操縦の仕組み
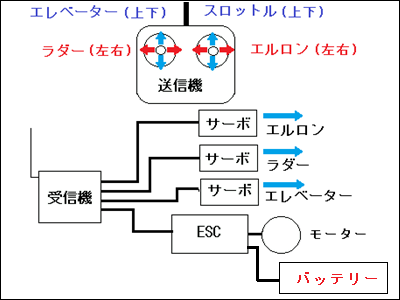
飛行機を操縦するにはエルロン,ラダー,エレベーターを動かします。エルロンとラダーは機体を傾けて傾いた方に機体を旋回させます。エレベーターは機体の後部を上下させて機体を上昇,降下させます。旋回はエルロンとラダーのうちどちらか一方でも可能です。 あとプロペラの回転を増減させるスロットルが必要です。 エルロン,ラダー,エレベーターはサーボを使い,スロットルはESCを使います。合計4つの機器を使うので信号も4種類は最低必要になります。
送信機の仕組み
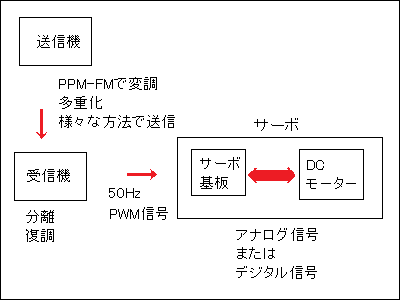
搬送波の送信方式 2.4GHzの送信機の信号は「変調(Modulation)」と「多重化(Multiplexing)」をして「搬送波(Carrier Wave)」に乗せて送ります。 受信機では受け取った信号を「分離(demultiplexing)」して「復調(Demodulation)」して元に戻します。 2.400GHz~2.497GHzの電波に関しては,送信出力が10mW/MHz以下であれば許可なく使用できます。5GHz帯も2.4GHz帯同様使えますが,周波数が高くなるほど電波の直進性が出てきます。2.4GHz帯の方が送信機に向いています。
2.4GHzの送信機の搬送波はスペクトラム拡散方式が使われています。スペクトラムは信号の周波数分布のことです。したがって「スペクトラム拡散」とは信号の周波数分布(スペクトラム)を拡散するという意味です。 スペクトラム拡散方式では搬送波の周波数分布が変調前に比べて数十倍に広がります。これには2つの方法が有り,搬送波を擬餌乱数コードで広い周波数に薄める方式(DSSS)と搬送波の周波数を高速で切り替えるホッピング方式(FHSS)があります。また,これらの方式の混在した方法もあります。 いずれの場合も受信する側で,送信側と同じ拡散方法で復元しないともとの信号は取り出せません。また,搬送波に乗せる信号の多重化,変調と復調方法も同じでないといけません。 ラジコンの世界でもほとんどかFHSS方式ですが,DSSS,FHSSとDSSSとの併用もあるようです。各社通信方式(プロトコル)に次のような名前を付けています。 FASST:futaba FHSS:futaba DMSS:RC DEPOT(JR) DSMX:Horizon Hobby(USA)のSpektrum DXe AFHDS:FLYSKY ※DSMXは空いている2か所のバンドでの同時発信と受信する方式で,片方が途切れても残りの片方で制御可能です。 2.4GHz帯は携帯電話,無線LAN,Bluetoothなどにも使われています。また,電子レンジは2.4GHz帯の電磁波を発生させる機械なので,飛行場では電子レンジ使用禁止です。(まさか使わないと思いますが……) 携帯電話,無線LAN,Bluetoothなどは方式が統一されていますが,ラジコンの世界では各社独自の方法を使い,同じ会社でも複数の方式が混在していて互換性がありません。使う側にとっては迷惑この上ない訳ですが,統一されれば素晴らしいですね。 大切なことは送信機と受信機は同じ通信方式でないといけないということです。

●RC DEPOT により DMSS 送信機が復活しました。現在日本メーカーではFutabaとサンワだけでしたが,数年ぶりにJRも復活しました。最安値はT6x4(6チャンネル)が21,900円です。その他多数復活しています。正式に権利を買い取ったようです。 ●「Spektrum」は米国企業「horizon hobby」の一つの部門です。DSSS方式で「デジタルスペクトラム変調」を採用しています。 http://www.spektrumrc.com/ ●「Frsky(フリースカイ)」と「Flysky(フライスカイ)」という似たような送信機があります。両方とも中国の企業です。 FLYSKY Model Ltd.は2006年に深センに設立 FrSky Electronic Co.Ltd.は2010年1月に江蘇省無錫に設立されています。 ●マルチプロトコルの送信機(複数の送信手段を持つ送信機)が安価で販売されていますが,すべてに対応している訳ではありません。確認が必要です。また,送信機の送信モジュールを付け替えてプロトコル(送信手段)を変更できる送信機もあります。送信モジュールは「技適マーク」(後述)が必要です。 ヘリやマルチコプターの世界では機体に受信機やジャイロが組み込まれていて互換性がないので複数の送信機が必要になります。したがってこのような機能が必要になりますが,飛行機の場合は受信機を選べるので必要性を感じません。
バンド数 無線LANは互換性を持たせるためにすべての機器が使用可能な2.GHz帯を14チャンネル(ラジコンの世界ではチャンネルは信号の種類のことで,バンドと呼びます)に区切って使っています。1つのチャネル(バンド)幅は 22MHz で,チャネル(バンド)どうしの間隔は5MHzとなっています。 一方ラジコンの場合は使用可能な2.GHz帯をもっと多くのバンド(30~40)に分けて使っています。そのため無線LANとは混信する可能性があるのではないかと考えます。 72MHzの10バンドより遥かに多くのバンドが存在するということと受信機が自動的に空いているバンドを見つけてくれるので他人のことを何も気にすることなくスイッチを入れて飛ばしても問題ありません。 72MHz帯は皆に使用しているバンドを確認してクリスタルを差し替えて開いているバンドを使っていました。または,空くまで待つと言う忍耐力が必要でした。 ただし,2.4GHzも最初に送信機と受信機のペアリング(バインド)が必要です。 ●Bluetoothは79チャンネル(バンド)です。
変調(Modulation)と多重化(Multiplexing) 生のデータは変調しないと広い周波数帯域が必要になってしまうので「変調」します。変調方式には次のようなものがあります。 パルス幅変調(PWM:Pulse Width Modulation) パルス位置変調(PPM:Pulse Position Modulation) パルス符号変調(PCM:Pulse Code Modulation) ほかにもいろいろありますがラジコンの送受信ではPPM,PCMが良く使われています。 また,受信機とサーボ,ESC間はパルス幅変調(PMW)が使われています。 同じ送信方式であっても送信機の変調(Modulation)方式と受信機の復調(Demodulation)方式が異なれば使えません。 下図はPPMのポジティブ信号とネガティブ信号の例です。約20ms周期でチャンネル数分のパルスを順番に送ります。これを時分割多重化といいます。(受信機は送信されるすべてのチャンネルを受信するとは限りません。) PCMはこのデータをデジタル変換しています。変換にかかる時間を考えるとPPMの方が有利ですが,雑音に強いのはPCMです。
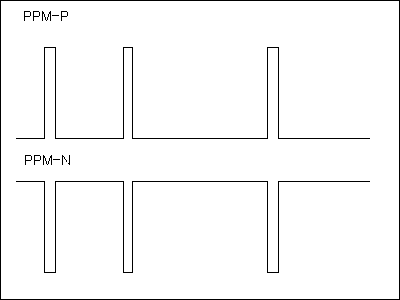
↑JRとSANWAはPPM-P,FutabaはPPM-Nのようです。 中心からパルスがいくらずれているかでデータの大きさを表します。したがってパルスの幅は一緒ですが,パルスの間隔がことなります。
PPMはアナログシリアル信号ですが,PCMはデジタルシリアル信号です。PPMもPCMも搬送波に乗せるときにAM方式とFM方式があります。
↑画像はwikipediaより
▶ AM broadcasting(AM放送)
AMは振幅変調(amplitude modulation),FMは周波数変調(frequency modulationt)です。
PPMもPCMも方式であって統一規格がある訳ではなく各社独自の方式を取っているようです。各社互換性がなく迷惑この上ないと考えます。 ●多重化にはほかにも周波数分割多重化などがあります。 ●多重化は昔から行われています。FMのステレオ放送は左右の音声信号をサンドイッチにして送っています。 また,S.busやC-PPM,パソコンで通信に使われるRS232Cはデジタルシリアル信号です。
指向性 アンテナから電波の放射される方向と強さの関係には,指向性と無指向性があります。 指向性のアンテナの代表はパラボラアンテナです。指向性が強いと遠くまで届きます。ラジコンの場合は無指向性のアンテナを使います。 λ/2のダイポールアンテナと接地型λ/4モノポールアンテナがありますが,長さから見て2.4GHzの送信機はダイポールアンテナのような気がします。 無指向性と言ってもアンテナの廻りでは下図のようになります。送信アンテナが垂直の場合,水平方向についてのみ言えることになります。
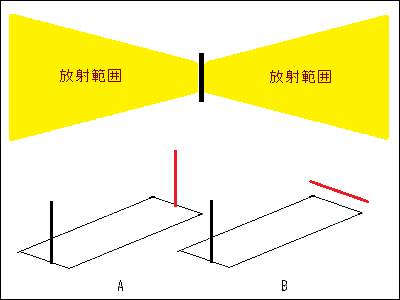
また,送信アンテナと受信アンテナが平行(A図)のとき受信強度は強く,直交(B図)すると弱くなります。 送信機のアンテナの先端を機体方向にできる限り向けないような操縦姿勢を心がける必要があります。特に,遠くまで飛ばすときは考慮すべきだと思います。送信機のアンテナは,送信機を手で持った時に鉛直になるようにすればよいと思います。
送信機のスティックモード 国産の物を購入する場合は問題ありませんがスティックの主なモードは次のようになっています。
モード1| 右スティック | 上下 → スロットル |
| 上下 → エルロン | |
| 左スティック | 上下 → エレベーター |
| 上下 → ラダー |
| 右スティック | 上下 → エレベーター |
| 上下 → エルロン | |
| 左スティック | 上下 → スロットル |
| 上下 → ラダー |
モード1 は日本標準,モード 2 はワールド・スタンダードなモードです。スロットルとエレベーターが入れ替わります。外国製品を購入する場合は確認が必要です。
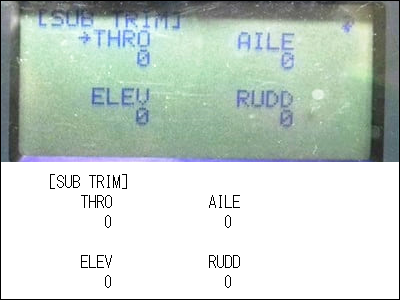
送信機の設定 送信機の主な設定には次のようなものがあります。バインドが終わってから行います。 ●リバース サーボの動きとスティックの動きを逆転させます。 スロットルチャンネルの場合うっかり逆転させると再スローがフルハイになり危険です。プロペラを外してから行う方が安全です。 ●サブトリム ニュートラル(中立)位置の調整です。リーケージで調整も可能ですが微調整は難しいので便利です。 各スティックの周りのトリムレバーでも調整可能ですが,これは飛行中に調整できます。一時的なものでサブトリムの値に影響はありません。 ジャイロのロックモードを使うとき送信機とジャイロでニュートラル位置が異なる不都合が生じます。できるだけリンケージでニュートラルを取るべきです。ジャイロを使うときはサブトリムを0にしてトリムレバーで調整します。
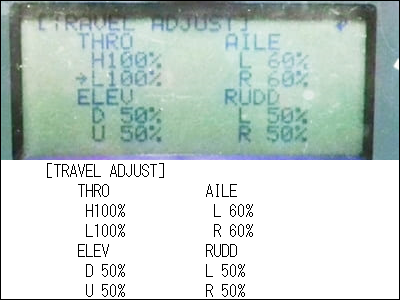
●トラベルアジャスト(=エンドポイント End Point) サーボの動作範囲の決定に使います。基本設定です。 +-100%が初期値です。主に動きが大きすぎるとき下げます。これは,サーボが回転しすぎて機体に当たったり,リンケージに負荷がかかったりするときに使用できます。 普通+-同じ量に設定しますが,エルロンサーボ2個を別チャンネルで使う場合,下げる方を大きく上げる方を小さくすることもできます。
スロットルチャンネルはエンジン機ではサーボを動かしてエンジンのスロットルを動かすので,このサーボを動かす範囲を変えることもできます。電動機では同じ信号を送り,ESCがモーターを制御しまが,当然範囲を設定できます。 ニュートラル位置を境にHとLが切替わりますが,Hを0%にすればニュートラル位置から上にスティックを動かしてもモーターの回転は増えません。出力が大きすぎて機体が暴れるときなどここでモーターの最大出力を抑えることも可能です。
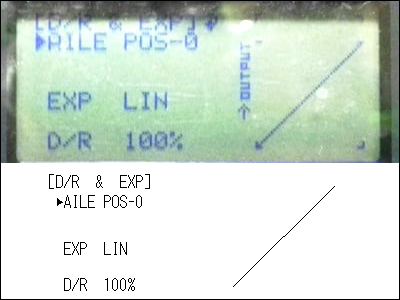
●デュアルレート・エクスポネンシャル エクスポネンシャルはサーボの動きとスティックの動きを調整できます。 「最初はゆっくり後半素早く」や「最初はすばやく後半ゆっくり」など調整できます。 好みで調整します。初期設定(直線的に変化)でも問題ありません。 デュアルレートはトラベルアジャスト(End Point)で設定された範囲内でサーボの動く範囲を設定します。送信機の上についているスイッチ(トグルスイッチ)で設定を飛行中に切り替えられます。 例えば,100%と50%の二種類設定しておいて,低速時と高速時でエルロンの動作範囲を変えられます。
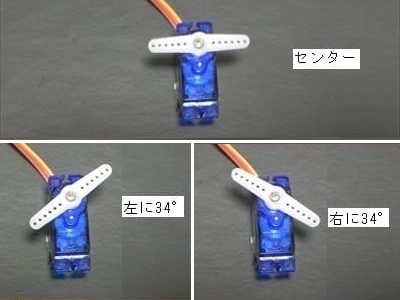
トリムとサブトリム トリムとサブトリムという似たような機能がありますが,少しだけ違います。 スティックはニュートラルで,サブトリムとトリムを最大値にしてサーボのセンター位置がどのように動くかみてみました。
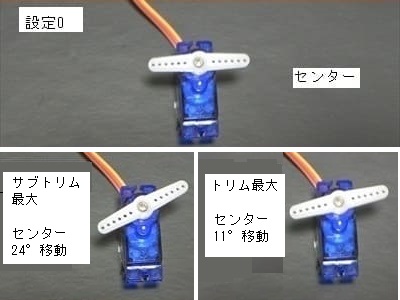
↑サブトリムは最大24°,トリムは11°センター位置が移動します。
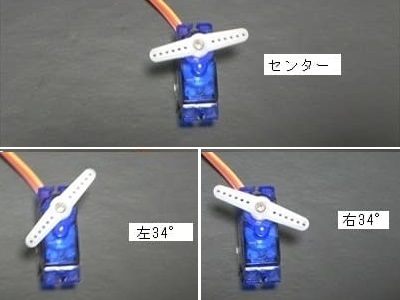
↑スティック操作による振れ幅は左右等しくて34°です。
↑スティック操作による最大振れ幅は,トリム設定0のときと同じでセンターから左右等しくて34°です。
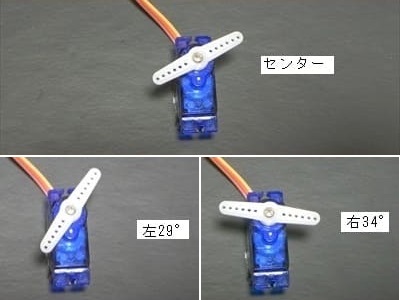
↑スティック操作による振れ幅は左右で異なってきました。
サブトリムの調整幅は大きいので,送信機で最大舵角を調整してサーボが触れすぎないようにしています。 サブトリムは使わずにリンケージでセンターを決めるのが基本で,飛行中のちょっとした調整がトリムだと思います。
日本で使えるか 日本で使えない送信機も販売されています Amazonなどで外国製品を直接買うと出力が大きくて日本の電波法違反になることがあります。「技適」製品かどうかの記載を確認する必要があります。 電波法違反は1年以下の懲役または100万円以下の罰金に処せられる可能性 (第110条第1号)があり,そうなると刑罰のため前科がつきます。注意が必要です。 外国製品は国内のショップ経由で買えば「ラジコン発信器適合証明」のシールが送信機の裏側についています。そのことを必ず確認してください。送信機裏に技適マークが付いていないものは使用することはできません。 特に次の場合は注意 ・並行輸入品 ・モード2(スロットルが左) ・海外から直接購入(amazonなど) ・オークションで購入

●外国製品を買うときは ▶Amazon.co.jp で検索すると「技適」の表示があります。ただし,直接購入するより少し高くなります。
改造~遊びです~
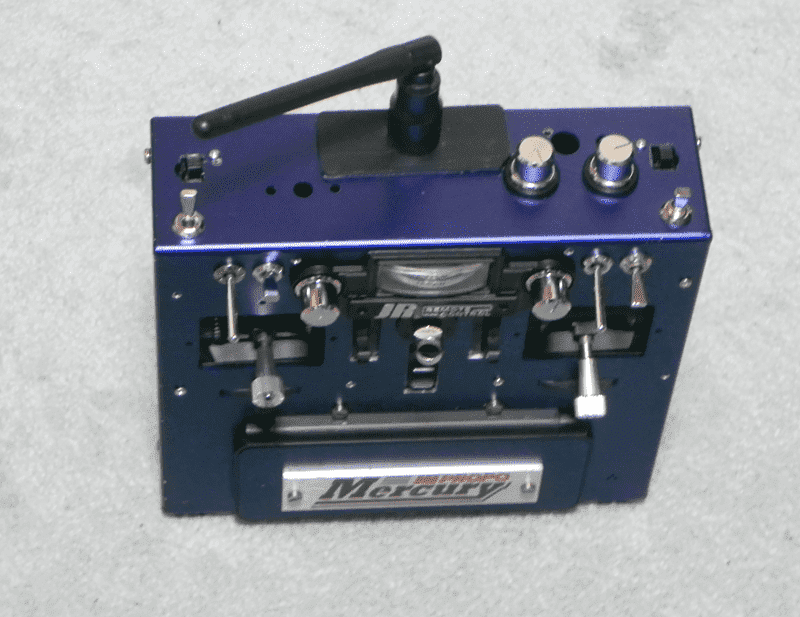
ヤフオクで JRの Mercury がいくつか8,000円ほどで出品されていました。これは組み立て途中の未完成品です。飾りになるかと思って落札しましたが,気が変わり JR XG7(DMSS)を分解して Mercury のケースに取り付けてみました。少し重くなりましたが特に異常なく使用できました。古い XG7 がかっこよくなりました。![]()

受信機の仕組み
送信受信方式の一致 受信機は送信機からの「搬送波」を受け取り,これを「分離(demultiplexing)」,「復調(Demodulation)」してサーボなどの機器と通信します。サーボなどの機器は通常PWM信号で駆動するので受信機は信号変換も行っています。 送信機に合った受信機でないと作動しません。普通は4チャンネルで十分だと思います。エルロンの差動,ジャイロ,引っ込み脚などを使うときは6チャンネル以上必要です。パークプレーン用は到達距離に注意が必要です。
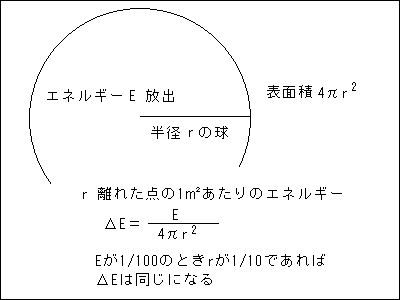
到達距離のテスト 送信機によっては出力を100分の1にしてテストできるものもあります。出力が100分の1なので受信距離は1/10になります。このとき50m届けば,出力をもとに戻せば500m届くことになります。 受信機とESCの間の信号もPWM方式を使用しています。
受信機のトラブルとして今まで経験したのは,スティックは触らないのに勝手にラダーやサーボが動くという現象でした。受信機の故障かと思ったのですがESCのBEC回路(電源回路)の容量不足でした。ESCを取り換えて念のため「接点復活材」を受信機のソケットに噴射したところ解消しました。受信機に限らずしばらく使っていない機体を飛ばすときや購入後永く使っていないサーボを使う場合などコネクターに接点復活材を使用した方がいいと思います。
アンテナの長さ アンテナの長さは使用する電波の振動数(周波数)によります。電波の周波数は 72Mz = 72×106Hz = 72,000,000Hz 2.4GHz = 2.4×109Hz = 2,400,000,000Hz となります。光速は3.0×108m/sなので,波長は72MHzで4.17m,2.4GHzで0.125mになります。 アンテナの長さは1/4波長で良いので 72MHz → 1.0m 2.4GHz → 0.031m=3.1㎝ となります。 2.4GHzの場合長いように見えますが下図のようにシールド線になっています。導体で包まれた空間内部には電磁波(のうちの電場)は侵入できません。 このことはアンテナの近くに導体があってはいけないということにもなります。少なくともアンテナの長さ程度は導体(各種配線,カーボン素材,金属,アンプ,バッテリー)から離す必要があります。
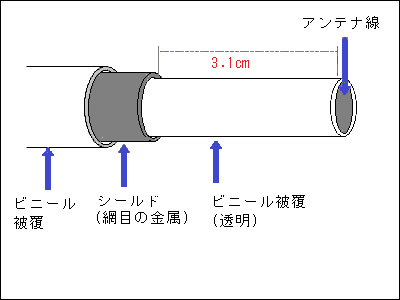
折れたときは剃刀の刃で外側の被覆を取り除き,ピンセットでシールド部分をほぐして取り除き,シールドされていない部分が3.1㎝になるようにします。 かなり細かい作業になります。面倒な時はケースから基盤を取り出して30W以下のハンダコテで付け替える方が早いかもしれません。アンテナ線は市販されています。
チャンネルとピン番号 受信機のピン番号とサーボなどの接続は各社の送受信の仕組みにより異なりますが,DMSS方式では次のようになっています。 1 THRO(スロットル Throttle) 2 AILE(エルロン Aileron) 3 ELEV(エレベーター Elevator) 4 RUDD(ラダー Rudder) 5 GEAR(ランディングギア Landing gear) 6 AUX1(予備) 7 AUX2(予備) 8 AUX3(予備)
●AUX1はフラップシステムに割り当てられている送信機もあります。 ●写真はJR用のものですが,CH6からS.BUSとMomal信号の切り替えができます。S.BUSの場合8チャンネルまで使用できます。 また,S.busジャイロなどが使えます。 ●エンジン機はスロットルチャンネルをサーボにつなぎますが,電動機ではESCにつなぎます。
チャンネルと信号 受信機は多重化された送信機からの信号を「分離」「復調」「変換」して各チャンネルに送ります。送信機のスティック操作の場合はPWM信号の幅はスティックの倒す角度に比例(Proportional)しますが,スイッチ類の場合は特定の幅だけが送信されます。 例えばランディングギア(gear)チャンネルは2種類の幅しかありません。(送信機によります。3種類もあります) ランディングギアは途中で止める必要はないのでこのような信号で十分です。また,フラップ信号も同様で,途中は必要ありません。 このPWMの幅の最大値や最小値はすべて送信機の「TRAVEL ADJUST」で変更できます。 受信機につなぐ機器はすべてサーボを動かす信号と同じです。ジャイロのスイッチなどもこのPWMの幅でON,OFFを切り替えます。 ●送信機のことを「プロポ」と呼びますが,これは「Proportional」が語源です。
S.BUS 受信機とハブ(無線LANのハブと同じ)間も信号をデジタル化,多重化して(デジタルシリアル信号)一本の信号線で複数の信号を送ります。受信機の1つのスロットからハブを介して複数のサーボを動かすことが可能です。
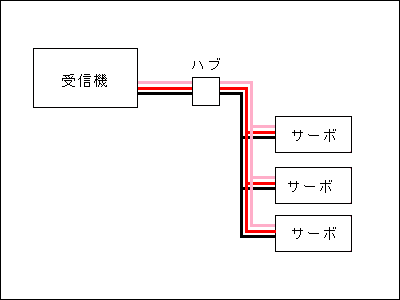
上図のように接続すれば,たとえば4チャンネル受信機を6チャンネル受信機として使用できます。スロットル用とS.BUS用の二つのスロットしかない軽量受信機も販売されています。受信機はS.BUSをサポートしているのが多いのですが,S.BUSサーボは高価なのが難点です。もちろん送信機もそれに対応している必要があります。ftabaの10Jなどは特に送信機の設定は必要ありません。
●よく単線接続と言いますが,ハブやサーボを動かすために電源が必要なので3本線になります。受信機とハブの間の信号線が単線です。 ●同様な接続方法は昔からUSBで使われています。パソコンはUSB機器用のアドレスを127個持っています。それらをUSB機器に割り当てています。 パソコンは各USB機器に対し,接続検出,通信速度検出,電源供給,信号の分配を自動で行います。 ●S.busは双葉電子工業が開発した独自のシリアル通信規格です。(8ビットシリアル通信のようです) 同様なものにJRのXbus,FrSkyのC-PPM(Common PPM)があります。 パソコンのシリアル通信ではRS-232Cという世界統一規格が昔から使われています。8ビットの信号を1つのデータとして9,600bps(ビット/秒)の速度で送っています。当然この信号はデジタルです。 ●JR DMSS 受信機でJRのX.Bus信号を受信してS.Bus信号を出力できるものがあります。(Corona R4DM-SB,R46M-SB,R4DM-SB) ●sbus信号を複数のPWM信号変換するデコーダーが販売されています。これを使うと普通のサーボ(PMW)が使用できるようです。
S.BUS2 S.BUS2はS.BUSを拡張,センサー類から受信機への双方向通信(テレメトリー機能)を可能にしたシステムです。 少ないチャンネル数で複数のセンサーの接続が可能になります。ただし,S.BUS2に対応した送信機,受信機とセンサーが必要になります。
バインド バインドとは送信機と受信機の間で通信ができるように設定する作業です。これにより送信機と受信機が一対一で通信可能になります。72Mzと異なり誰かが使っているバンドは使えないといった制限がなくなります。 バインドの方法は送信機が同じでも受信機より異なります。受信機購入後はマニュアルを大切に保存しておく必要があります。

↑ニッカド4.8V 受信機用バッテリーと受信機のみでバインド リポバッテリーは使えません。
ほとんどバインドプラグを指定のチャンネルに差し込んで,ボタンを押しながら電源を入れます。 機体に取り付けなくてもバインド可能です。そのほうが楽です。 写真はチャンネル4にバインドプラグを差し込み,ボタンを押しながら受信機用ニッカド(5セル4.8V)でバインドしています。バッテリーはどのチャンネルに差し込んでも並列なので構いません。 ●送信機によってはノーマル出力とs.bus,x.bus出力などを選択できるタイプがあります。送信機の出力タイプと受信機のタイプが一致していないとバインドできません。 例えば送信機で,s.basを出力している場合,通常の受信機とはバインドできません。
受信機,ESC,サーボの電源
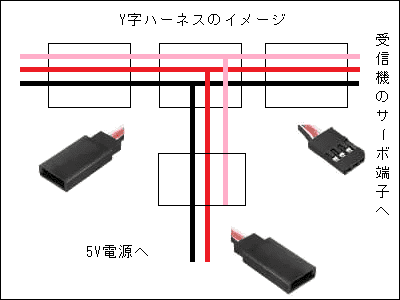
受信機,ESC,サーボなどラジコンで使用する制御機器はすべて5Vで動きます。受信機も5Vで動き,ESC,サーボなどに信号を送ります。 受信機のスロット(差し込み口)の配線は下図のようになっています。+5Vと0Vは繋がっています。したがってすべての機器の電源は一か所から供給すればいいことになります。 カラーコードは信号,5V,0Vの順に白赤黒(Futaba)と並んでいるものと黄赤茶(JR)と並んでいるものがあります。
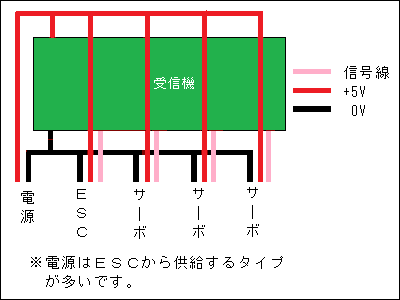
受信機用電源スロットは必要性がなく,省略されている受信機が多くなっています。 このの5Vの電源をどのように供給するかというと次のような方法がとられています。 ①ESCの内部に5Vを作り出す回路(BEC回路)を組み込む。(ESCの項目参照) ②リポバッテリーの電圧を変換する機器を取り付ける。(外部BEC回路) ③4.8Vのニッケル水素バッテリーやニッカドバッテリーを使う 通常はESCの内部に5Vを発生するBEC回路が組み込まれていることが多く,特に意識せずに①の方法で使っていることが多いと思います。 ただし,BEC回路の容量不足で②の外部BEC回路を利用する場合や②のバッテリーを使用する場合は,ESCの電源コードは途中でカットします。また,ハンドランチグライダーなどでESCを使わない場合は②の方法がとられます。 どこの端子からでも電源が供給できます。受信機用電源スロットがない場合は空きスロットを利用できます。外部BEC回路を利用するとき,空きスロットが無い場合はY字ハーネスでどのスロットでも利用できます。
ESCにBEC回路が組み込まれている場合,ESCの電源を他で使用しなければ電源線はカットします。ただし,BEC回路が組み込まれていないESCは,ESCを動かすための電源が必要です。
●受信機やサーボの使用可能電圧は 5V(4.8 ~6 V)のものがほとんどです。7.2Vまで対応している機器(ハイボルテージ仕様)があり,それをそろえればBECは必要がなく,2セルリポが使えます。ハイボルテージ仕様は5Vでも使えます。 受信機用2セルリポも市販されていますが,購入には注意が必要です。 ●サーボのコネクターはメーカー共通です。ただしFutaba用はコネクターに出っ張りがあるので,Futaba以外の受信機で使う場合は出っ張りをカッターなどで削れば問題なく使えます。
サーボ
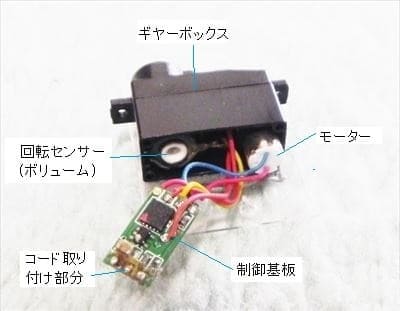
仕組み サーボ内部にはモーターとこれに連動した可変抵抗(ポリューム)があります。可変抵抗は回転角に応じた抵抗値を示します。この抵抗値が分かれば回転角が分かることになります。(この仕組みをポテンショメータと言い,リニア型もあります) 回転角を何度にするかをPWMのパルス幅でサーボに送ります。PWMのパルス幅から得られる回転角とポテンショメータから得られる回転角が異なるとき電流を流して両方の角度を一致させます。 制御基板は一種のコンピューターです。信号周期を得るためのタイマー,モーターからの回転角のフィードバックと信号を比較してモーターに電力を供給する回路などが含まれています。下の写真でもICチップが確認できます。
PWM信号 受信機とサーボ,ESCなど接続機器との間の通信はPWM(Pulse Width Modulation パルス幅変調)方式を使用しています。各社の受信機,サーボともにほぼ共通にPWM周波数は50Hz(周期20,000μs)を使っているのでどのメーカーを選んでも同じです。(「分離」と「復調」後の信号です)
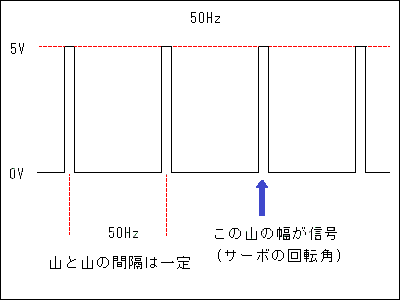
上の図の横軸は時間です。周波数50Hzとすれば山と山の間隔は20,000μs(1秒/50)です。 山の幅(パルスの幅)は1,500μsを中心におよそ±500μsの範囲で変化します。(幅に-は無いので) つまり1,000μsで左に90°1,500μsで0°,2000μsで右に90°のように動きます。 送信機での表示は-150%,+150%のように表示されます。(送信機の表示の初期値は±100%です)
●Futabaは1,520μsで0°のようです。 ●ESCにもPWM信号を送ります。エンジン機の場合はエンジンのスロットルはサーボで動かします。 ●送信機のスティックがニュートラルのとき送られてくる信号のパルス幅は1,500μsですが,送信機の「サブトリム」でこの幅を変更できます。例えばスティックがニュートラルのときの信号幅を1,600にするとサーボはその位置をニュートラルとして止まります。 ●間隔20,000μs(50Hz)で信号幅の最大値が2000μs程度なので間隔にだいぶ余裕があります。したがってまだ高い周波数で使うことも可能です。そのときは送信機,受信機,サーボともにその周波数に一致したものが必要です。(ハイスピードサーボなどあります。) 次の表は受信機のサーボ信号についてメーカーのサイトから調べた結果です。
| サーボレート | 動作電圧 | |
| R4DM-SB DMSS | 13~14ms(71~76Hz) | 3.6V-8.5V |
| R6DM-SB DMSS | 13~14ms(71~76Hz) | 3.6V-8.5V |
| FrSky TFR8 SB | 14,7ms(71,143Hz) | 3.5V~10V |
71Hzの信号を出力していました。(143Hzはハイスピードモード)この位は許容範囲のようです。
●いくつか疑問点があります。 受信機はPPM,PWM,S.Bus信号を出力できるものもあります。受信機とサーボ,ESC,ジャイロの間の信号はいろいろあるようです。しかしサーボモーターの駆動はPWMなのでそのような場合はサーボ側でPWMに変更する必要があるのではないかと思います。 サーボのS_Bus用やジャイロの中にはS.busおよびPPM入力可能なジャイロがあります。特に記載のないものはPWMと考えてよさそうです。 PPM-N(Futaba)とPPM-P(JR,Flyskyなど)の違いはどう処理されるのか分かりませが,ESCの設定で「Futabaはスロットルをリバースに」とありますが,このあたりに原因があるのかもしれません。もしかしたらサーボも逆に動くのかもしれません。
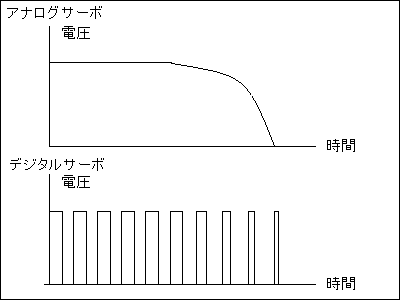
アナログとデジタル 最近デジタルサーボが安価になってきました。サーボに入力されるPWM周波数は50Hzですが,サーボ内の制御基盤と角度センサーとの信号のやり取りはアナログとデジタル両方があります。デジタル信号を使っているものをデジタルサーボと呼んでいます。したがって普通の送信機,受信機でデジタルサーボを使用できます。
↑一般的な回路の模式図です。いろいろな方法があります。
アナログサーボは目的の角度と現在角度の差が小さくなるのにしたがってモーターに流す電力は少なくなりますが,デジタルサーボは常に一定の電力をモーターに流します。デジタルサーボは反応が早いという特徴があります。また,保持力も大きいでしょう。(ディジタルサーボではパルス電圧でDCモーターを駆動します)
●ジャイロは素早い反応が必要なのでデジタルサーボを指定しているのもあります。 ●デジタルサーボにはPWM周波数が150Hzのもの,それ以上のものもあるようです。このタイプのサーボを使うには送信機,受信機,サーボ共にそれに対応している必要があります。 ●上図で受信機とサーボの間の信号をPWMと書きましたが,PPM,S.Busなどもあります。 ただし,受信機がその信号を出力し,各機器がその信号に対応していて正しく動作することが必要です。 例1:Detrum IstoneAcro 飛行機用6軸ジャイロ Futaba S.BUS,PWM入力をサポート 例2:HobbyEagle A3 Pro 飛行機用3軸ジャイロ PWM 920~2120us 1520us PPM,Futaba S.BusおよびS.Bus2をサポート 例3:corona sb-9029 S.Busサーボ サーボはS.Bus信号用のサーボです。Futabaがほとんどですが,corona社も作っています。 例4:Raiolink R6D 2.4Gデュアル6CH受信機 6チャンネルからPPM信号を出力できます。
トルク
ラダー用1個,エレベーター用1個とエルロンがあれば1~2個が最低必要です。
カタログにはトルクが書いてありますが,トルクとは力と距離の積です。単位は模型飛行機の場合 kgf cm を使います。(kgは質量の単位なのでkgwまたはkgf とすべきです)
トルクが 1.0 kgf cm の場合
腕の長さ(ホーンの長さ)1㎝のとき1kgの錘を持ちあげることが可能
腕の長さ(ホーンの長さ)2㎝のとき0.5kgの錘を持ちあげることが可能
と言うことです。
ラダーやエレベーターの抵抗力Nは
![]() のように書かれます。Cdは抵抗係数,ρは空気密度,Sは前面投影面積,vは速度で表されますが,ラジコン飛行機において抵抗係数Cdを求めるのは無理です。(この関係は翼の揚力や抵抗力を求める式と同じ形です。)
したがっておおよそ次のような基準で決めています。
のように書かれます。Cdは抵抗係数,ρは空気密度,Sは前面投影面積,vは速度で表されますが,ラジコン飛行機において抵抗係数Cdを求めるのは無理です。(この関係は翼の揚力や抵抗力を求める式と同じ形です。)
したがっておおよそ次のような基準で決めています。
| スパン | 機体重量 | サーボ(トルク) |
| 60㎝ | 120g程度 | 4.4g(0.6㎏f ㎝ 程度) |
| 70㎝ | 200g程度 | 6.0g(1.0㎏f ㎝ 程度) |
| 80㎝ | 500g程度 | 9.0g(1.7㎏f ㎝ 程度) |
| 100㎝ | 1,000g程度 | 12.0g(2.0㎏f ㎝ 程度) |
トルクの単位はISO国際規格では Nm(ニュートンメートル 1kgf m = 9.8 Nm) です。模型飛行機の世界では Kgf ㎝ が使われます。Kg ㎝ と表記してあるのが多いのですが,これは正しくありません。大きな間違いは ㎏/㎝ という単位です。この単位だと腕の長さが2㎝の場合,1㎝の場合の2倍の力を出すサーボになってしまいます。
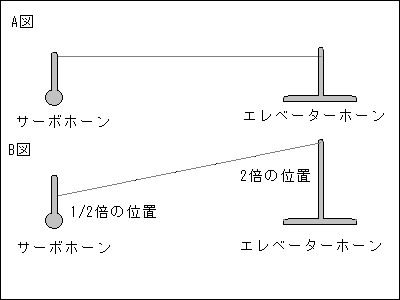
ホーンの長さとトルク サーボホーンやエレベーターホーンなどにはいくつか穴が開いています。また,ホーンの長さもいろいろあります。回転の中心からの距離(モーメントアーム)の違いによりエレベーターなどの回転の力は異なってきます。 図Bは図Aの4倍の力になります。ただし,回転の角度は図Bは図Aの1/4になります。サーボのトルクが小さいときはサーボ側のモーメントアームを小さく,エレベータホーン側を長くします。
反応速度 一般的なサーボは,デジタルサーボも含めて,どれも60°回転するのに必要な時間はメーカーの公表値でみると0.1~0.12sほどで差はありません。ただし,これは無負荷の値です。負荷が増えると当然速度は落ちます。 速度を上げるには次のことが考えられます。 ①トルクの大きなサーボを使う。 ②サーボホーンを長くして少しの回転角で舵が動くようにする。(上図A。大きめのトルクが必要です。) ③デジタルサーボを使う ④摩擦力などの負荷を小さくする。ヒンジなどリンケージの検討 などが考えられます。
トラブル S.BUS(後述)対応の高価なサーボから数百円の安価なサーボまでいろいろありますが,安価なものは中国製だと考えて間違いないと思います。中には粗悪品も混じっています。原因は材料が粗悪か不良品をはじいていないかなのでしょう。 ひどいのはホーンを付けてみると初めからガタがあるもの。蓋がすぐに外れるもの,すぐにギヤが欠けるものなどがあります。 JRやFutabaなどは長く使えます。10年以上前のものも何の問題もありません。さすが国産ですが高価です。 中国製でもE-MAXブランドは今まで使って特に問題はありません。サーボだけでなくモーターも推力がでます。信用できるブランドだと思います。 サーボは直接飛行に影響するので信頼できるものを選ぶ方が後々トラブルもなく無難です。
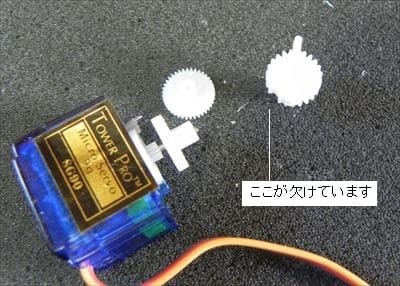
↑ギヤ欠けの例。墜落の衝撃でエルロンサーボのギアが欠けました。
現象としてはホーンが欠けた位置に来ると振動したりサーボーのモーターの回転が止まらなくなったりします。

↑古いサーボなど作りが悪いと基板とのはんだ付け部分が腐食することがあります。マイクロサーボなどそもそもはんだ付け部分が1㎜程度なので強い力には耐えられません。
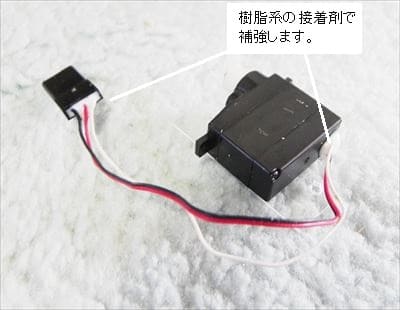
↑コネクターのコードが抜けると大変です。コネクターとサーボ本体下部に樹脂系の接着剤を付けておけばやや安心です。 写真はマイクロサーボ(約4g)に「速乾クリア」を塗ったところです。まだ乾いていませんが,乾くと透明になります。
コネクターについて コネクターは一見同じに見えてもいくつか種類があります。
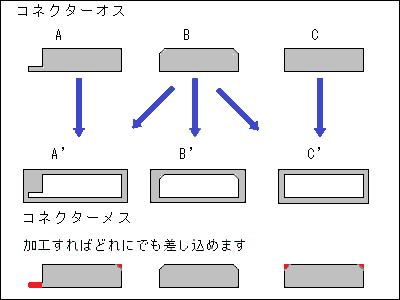
Aはfutabaタイプ,BはJRタイプと呼ばれています。差し込み時に+と-を間違えないようにしてあるのですが,すべてを一社に統一することは無いと思います。オス側のコネクターをカッターナイフで削れば差し込み自由になりますが,極性に注意が必要です。 futabaやJRの純正の受信機などは極性が示していないこともあるので特に注意が必要です。
要点まとめ
⑴ 送信機の送信方式と受信機の受信方式が一致していて送信機の変調を受信機で復調できること。 受信機には使用できる送信機名が示してある。 ⑵ 受信機と各接続機器の間は,普通はPWM信号で互換性がある。 ⑶ S.BusやC-PPM信号でサーボやジャイロを動かすには,受信機と受信機がS.Bus信号やPPM信号に対応していること。また,サーボやジャイロがS.BusやPPMに対応していること。 ⑷ 受信機の中には複数の信号(S.Bus,C-PPM,PMW信号)を出せるものがある。 ⑸ デジタルサーボは,受信機の間はPWM信号で,サーボ内部がデジタル信号で動く。したがって普通のサーボと互換性がある。 ⑹ ハイスピードモードを使用するには受信機と各機器がその信号周波数に一致していること。 ⑺ 接続機器は受信機から電源を取るのでハイボルテージの受信機の使用には注意 ●PWM信号を出力するごく普通の受信機,PWMで動く普通のサーボ,普通のジャイロで十分です。
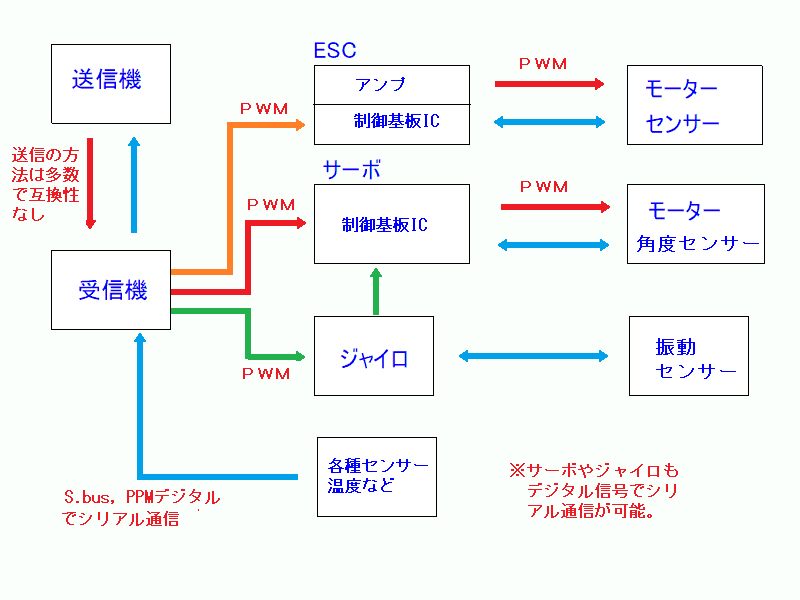
↑信号の流れの模式図
参考文献等 ▶RC DEPOT ▶日本ラジコン電波安全協会 ▶スペクトラム拡散(Wikipedia) ▶双葉電子工業株式会社 ▶ノイズに対抗する無線LANのスペクトラム拡散とは? ▶フタバのFASSTとFHSS ▶AM broadcasting(AM放送)(Wikipedia) ▶ラジコン(Wikipedia)