胴体の加工
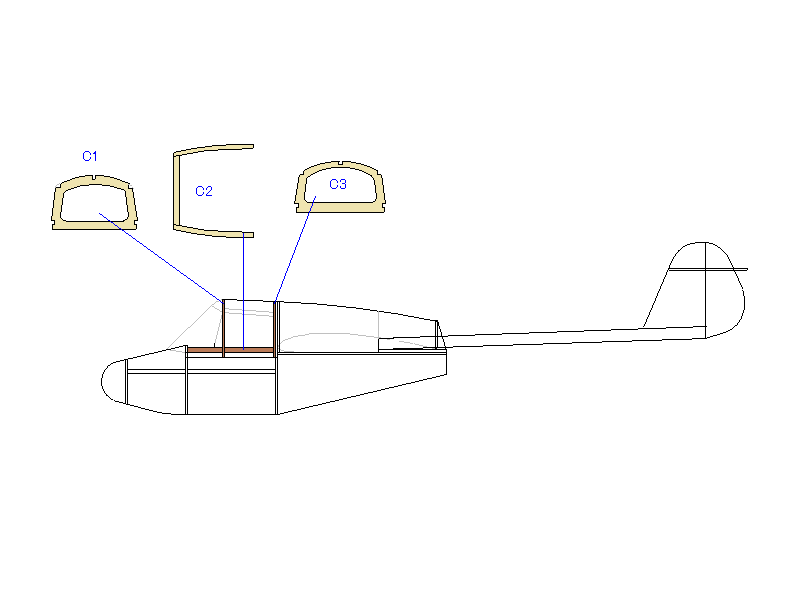
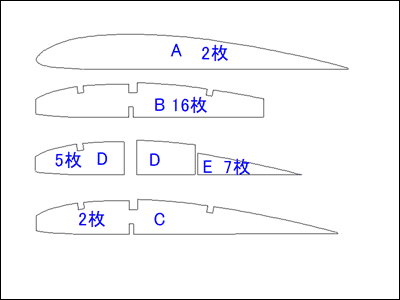
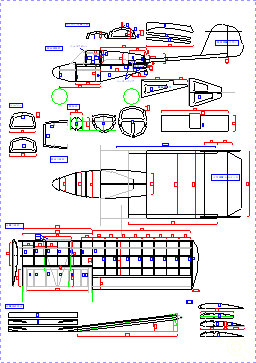
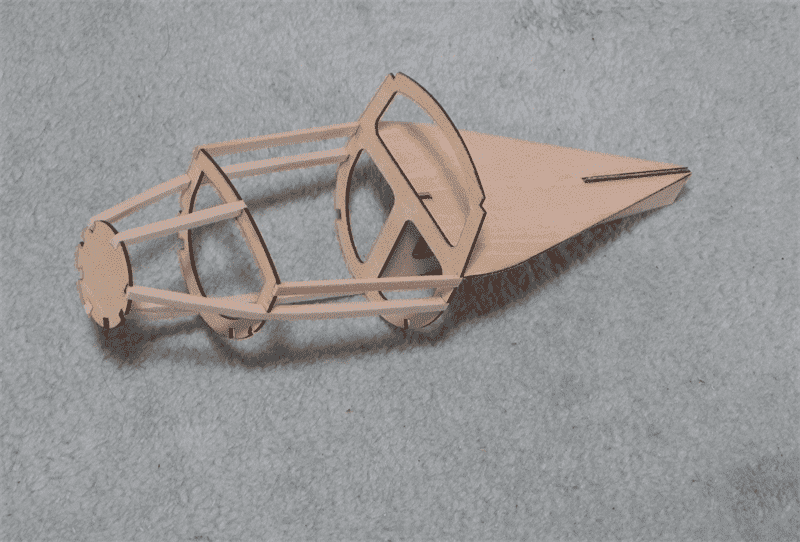
↑胴体枠の配置図です。

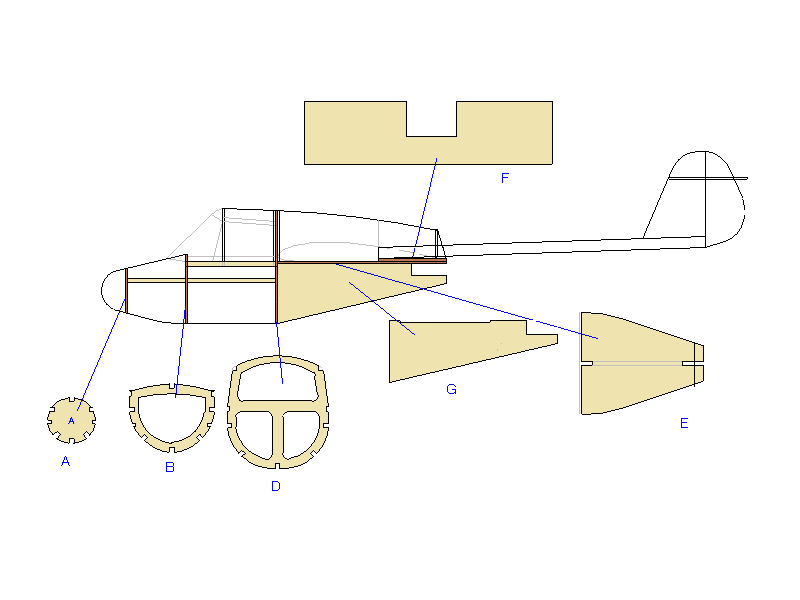
↑はじめに枠D,G,Eを接着します。写真は下からみています。
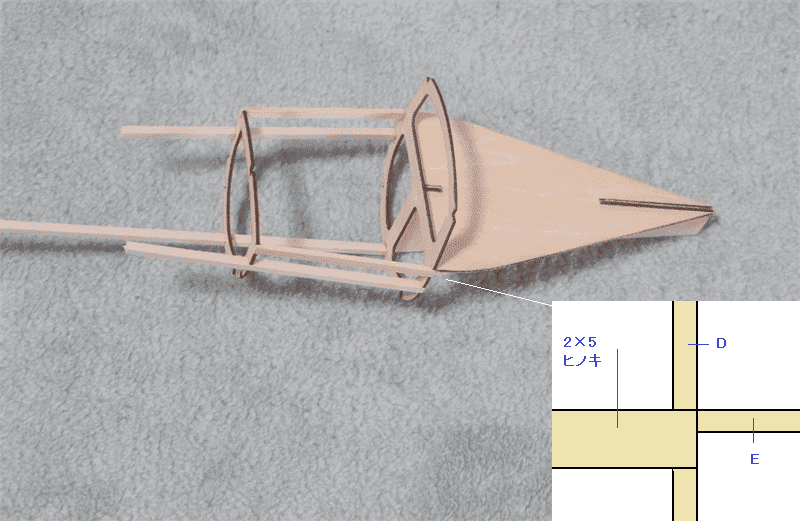
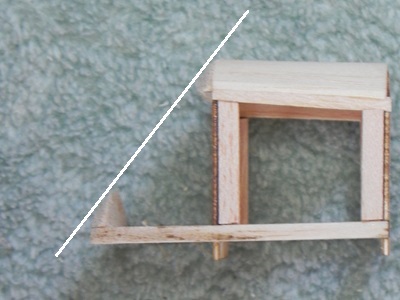
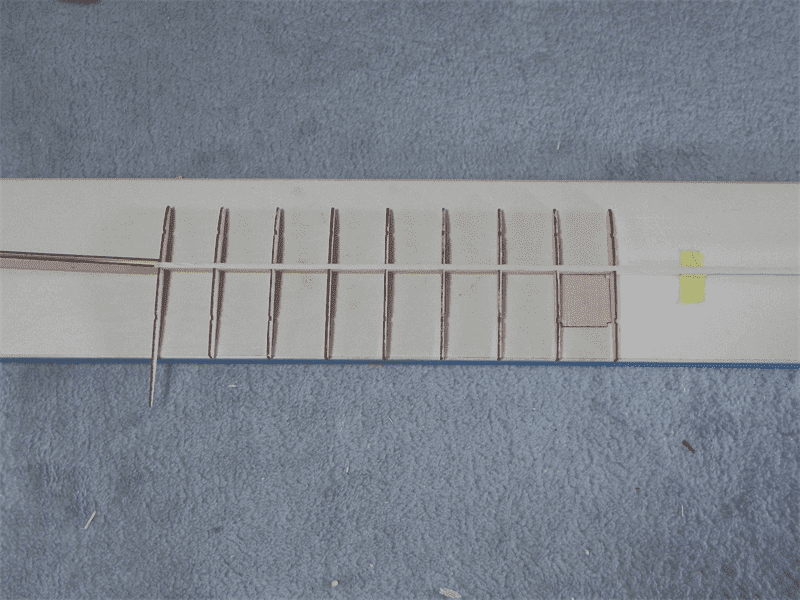
↑枠Bを2×5ヒノキと4×4バルサで支えて接着します。2×5ヒノキと枠Eが水平(一直線)になるように,また,位置関係を注意します。
↑枠Aを4×4バルサ4本で接着します。下側のバルサは曲面を作るために2本つなぎます。(下の写真参照)
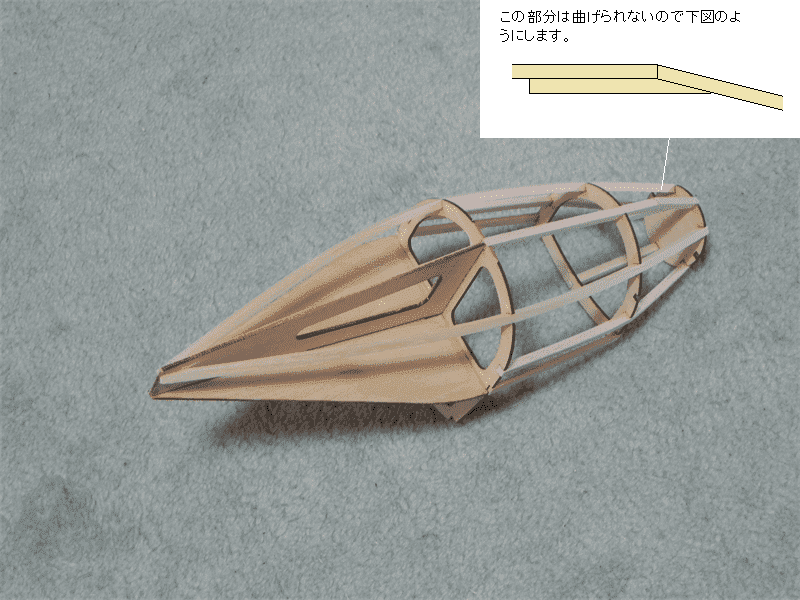
↑枠Aから枠Gの後端まで1本の4×4バルサで繋ぎます。曲面になるように曲げますが,水で軽く湿らしてゆっくり曲げていきます。
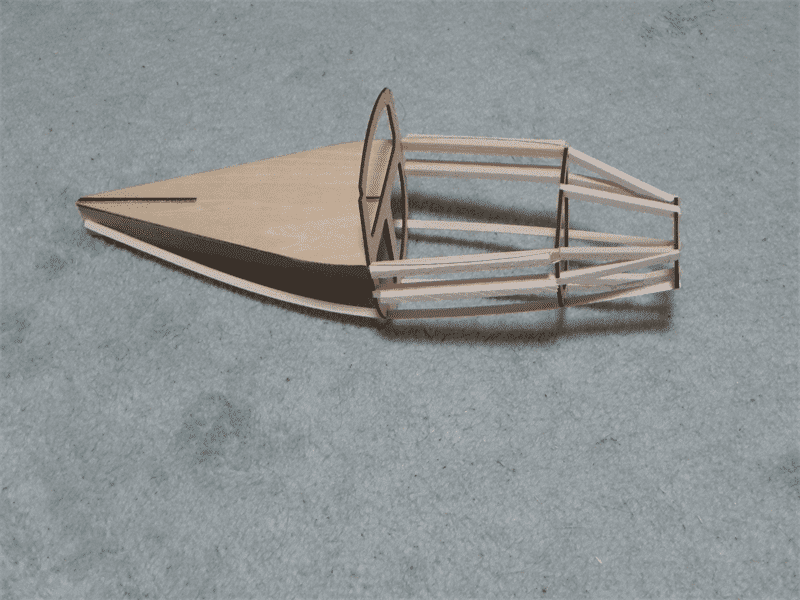
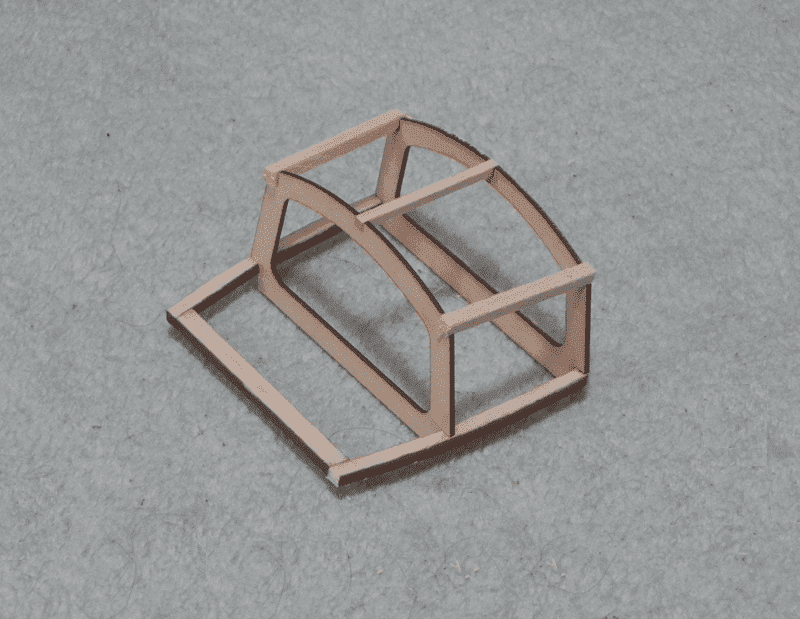
↑側面の2×5ヒノキとその下の4×4バルサに,曲面をつけるために4×4バルサを接着します。キャノピーの枠C2の曲面に合うようにサンドペーパーで成形します。
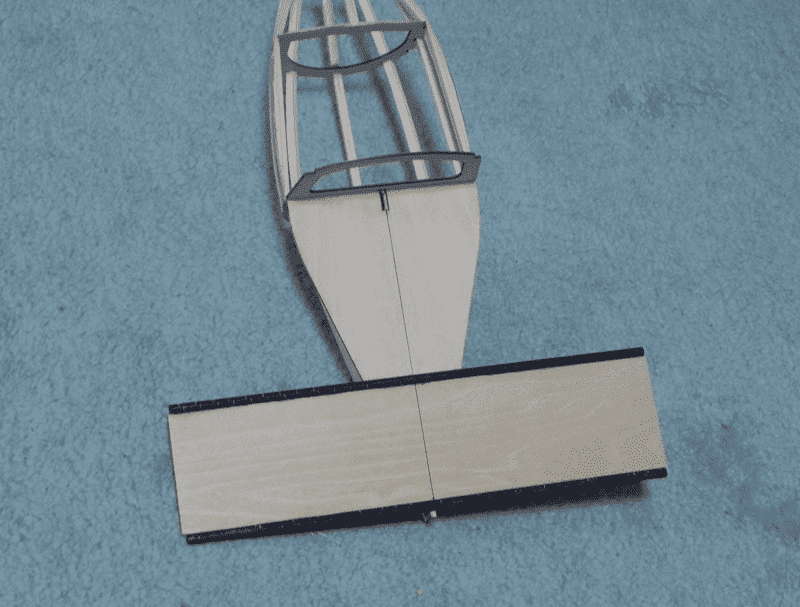
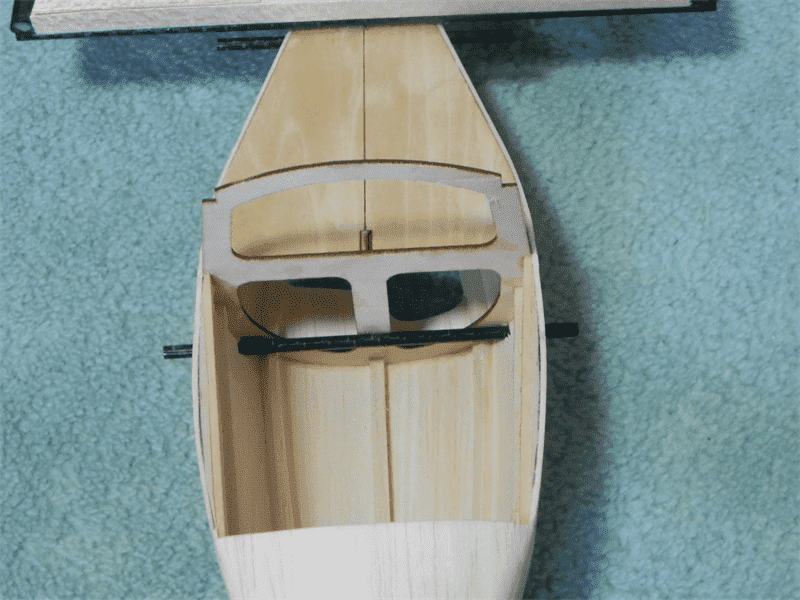
↑枠Fと4㎜Φのカーボンパイプを取り付けます。このカーボンパイプはしっかりとエポキシ樹脂接着剤などで取り付けます。構造上重要です。 Gには主翼をゴムで止めるためのカーボンパイプを通す穴を開けておきます。 (モーターの取り付け位置を変更したので実際とは少し異なります)

↑カーボンパイプの取り付け位置は前後で異なります。
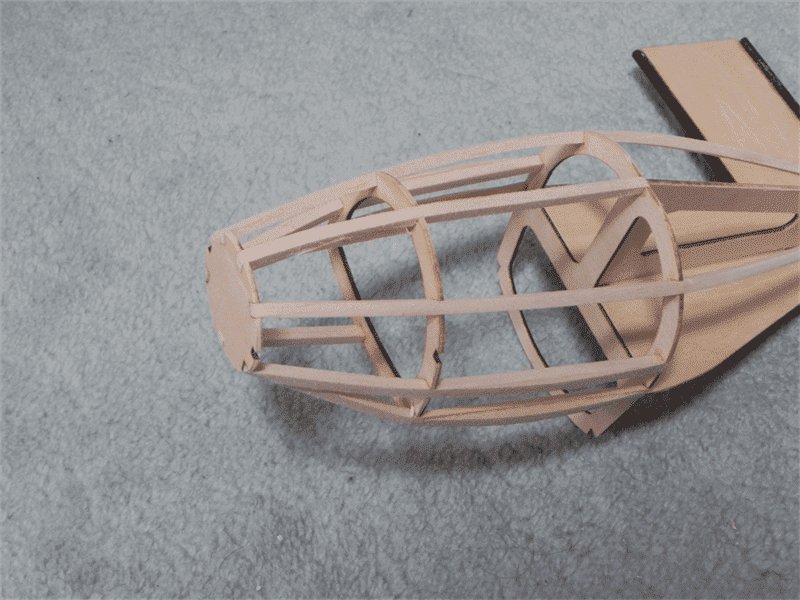
↑プランク作業の前に全体にサンドペーパーをかけて丸みをつけます。
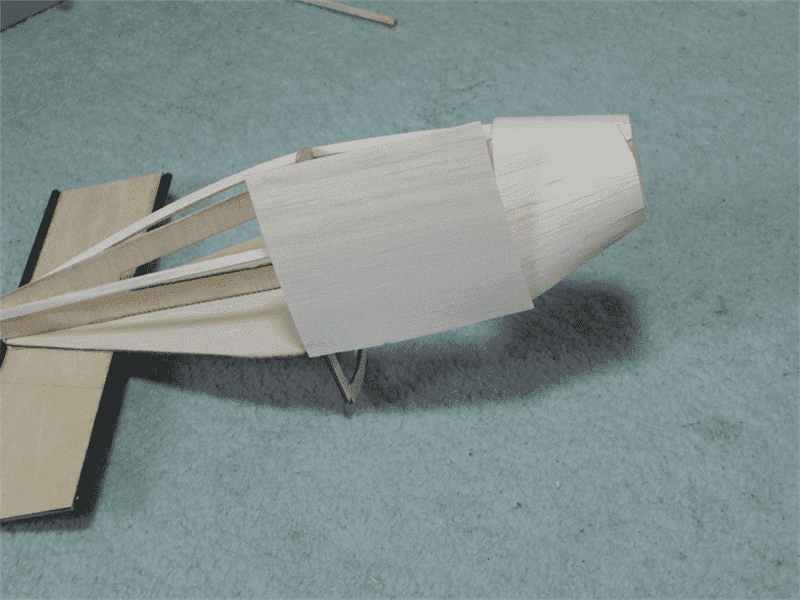
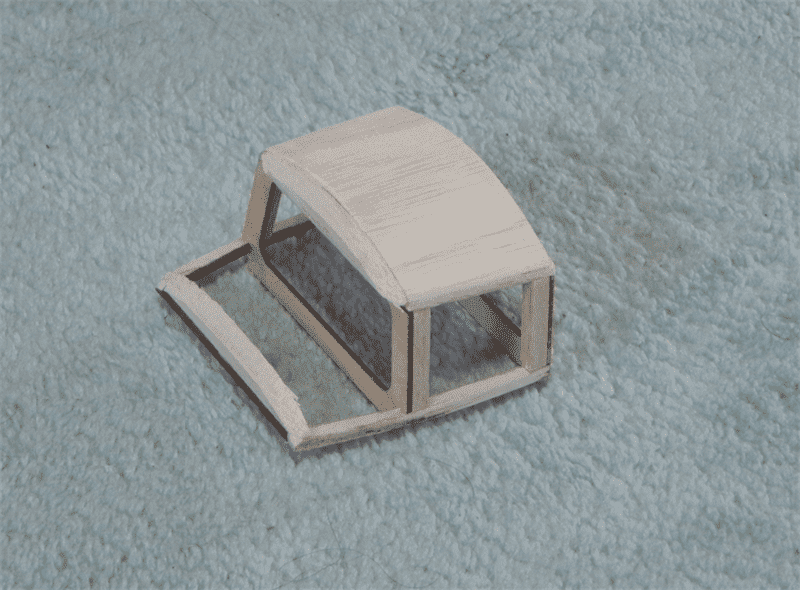
↑1.5㎜厚バルサの柔らかいものを選び貼り付けていきます。一か所留めて少しずつ曲げながら縁をカットして合わせていきます。 曲げにくいときは少し水で湿らせるとうまくいきます。

↑プランク作業が終わったら角を丸めます。

↑後部はまず側面を貼りますが,両方の曲線が同じになるように補強を入れます。 (モーターの取り付け位置を変更したので実際とは少し異なります)
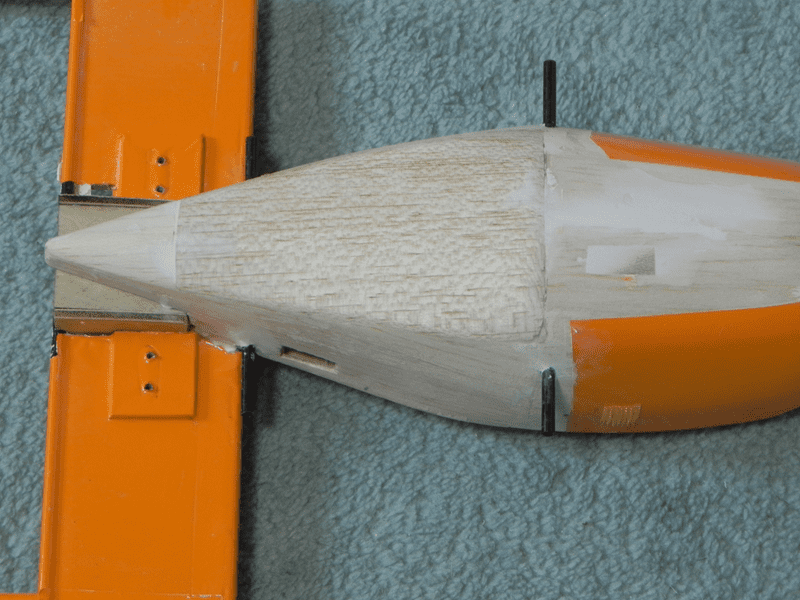
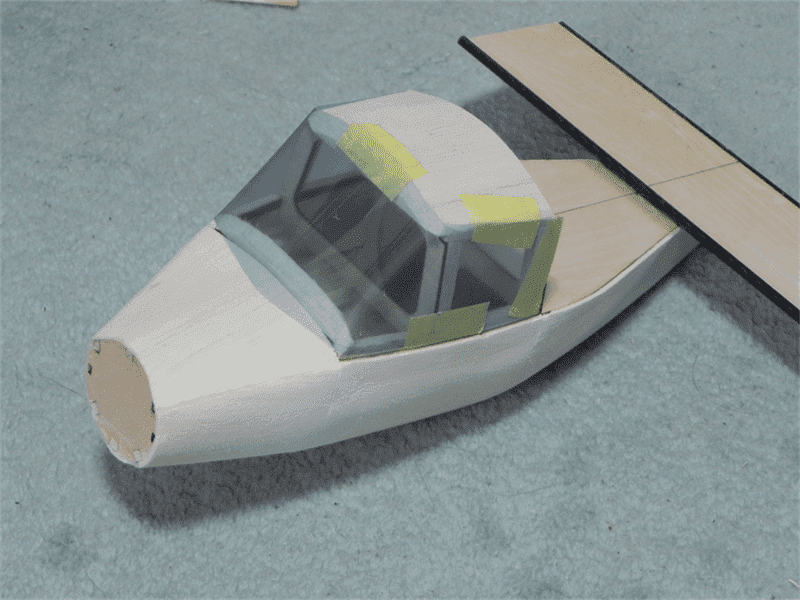
↑写真のように貼り,サンドペーパーで角を丸めます。

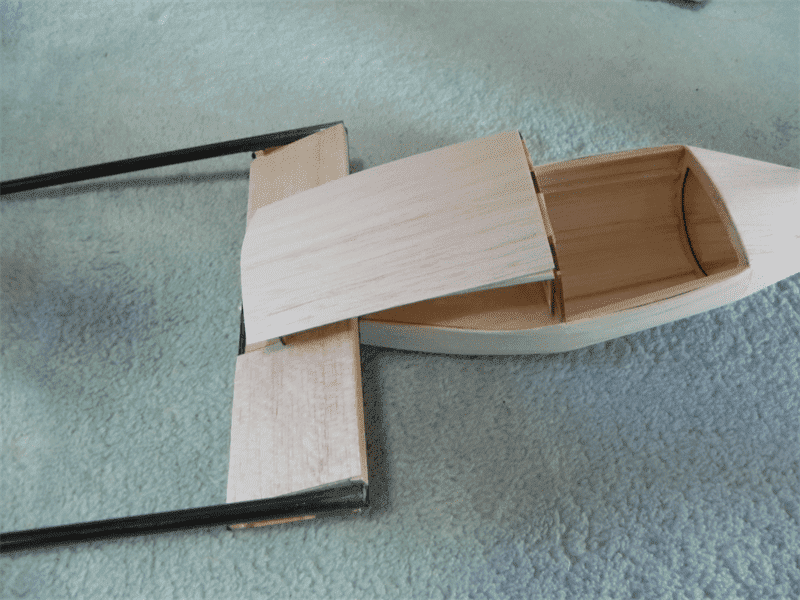
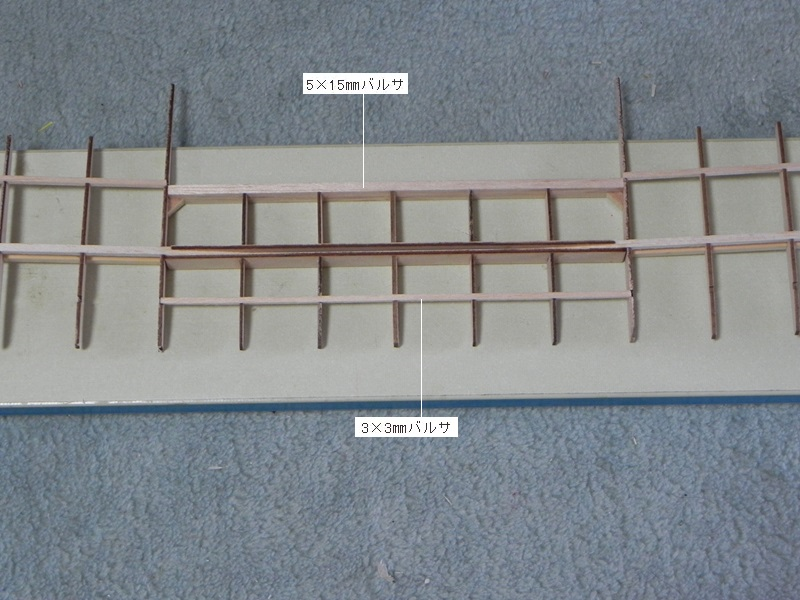
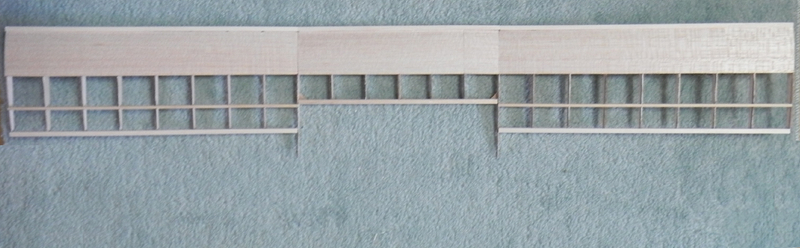
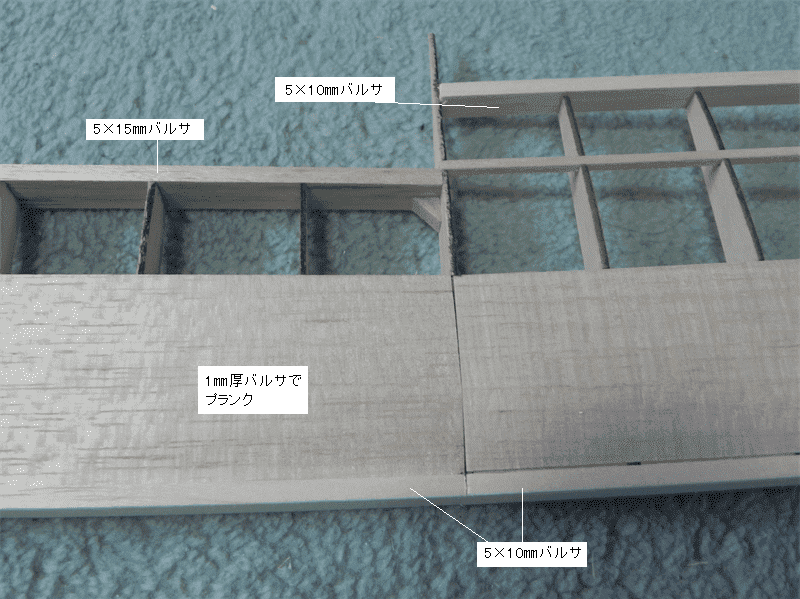
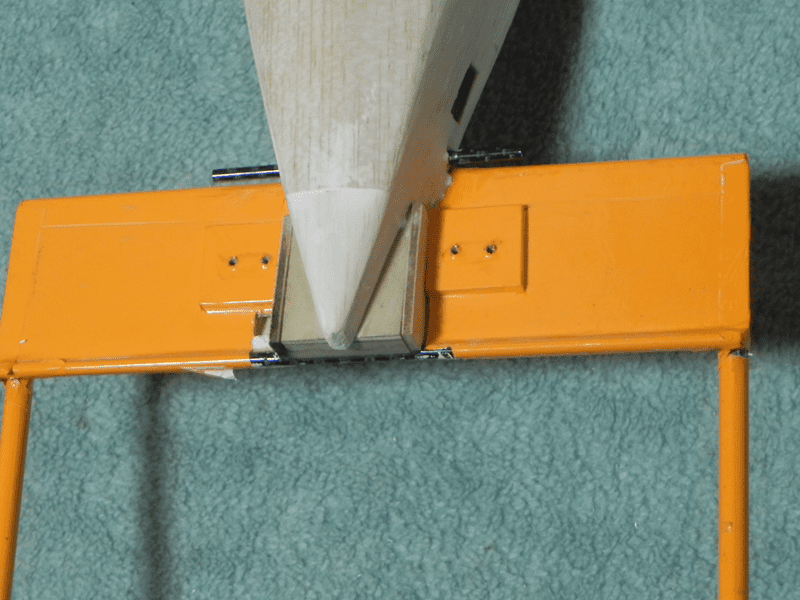
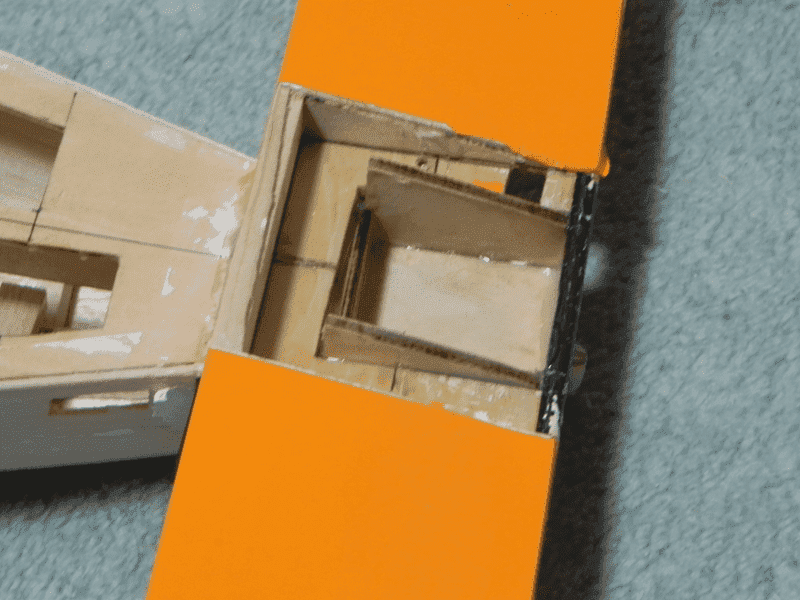
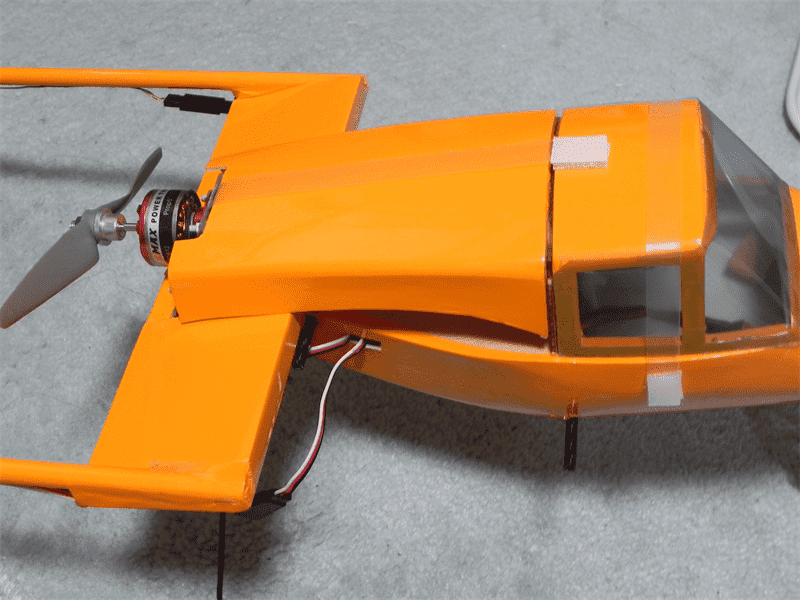
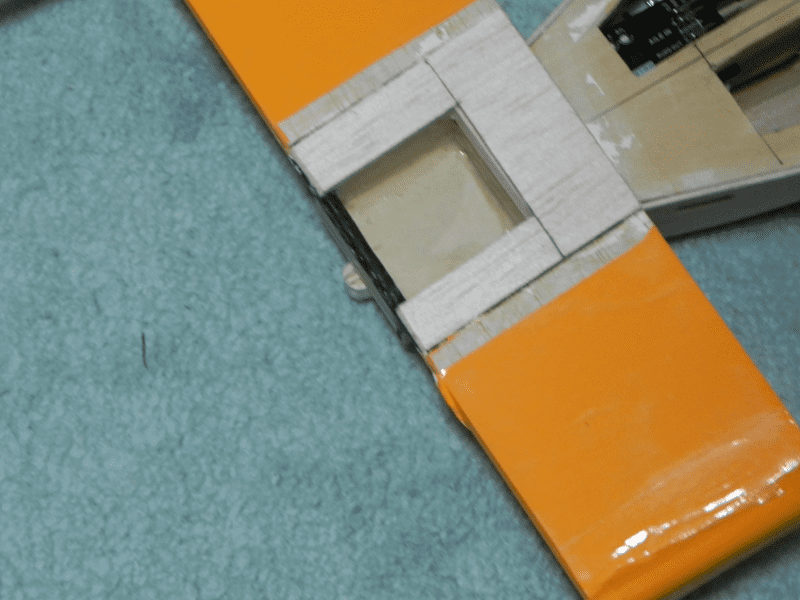
↑胴体後部の主翼部分です。双胴なので連結の強度の関係で,主翼の後約1/3は胴体側に取り付けます。また,1㎜厚バルサで覆います。
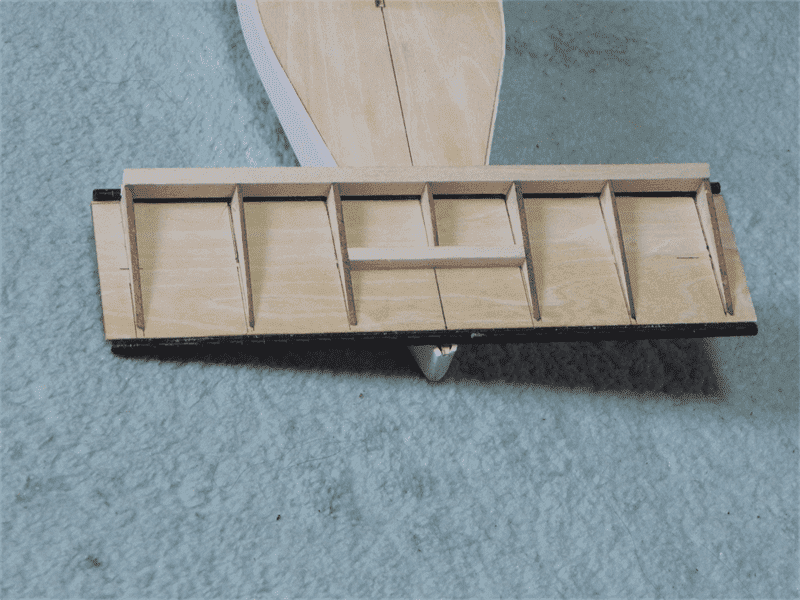
↑モーターの取り付けスペースとして,中央を奥行き30㎜,幅60㎜カットしてあります。 (モーターの取り付け位置を変更したので実際とは少し異なります)
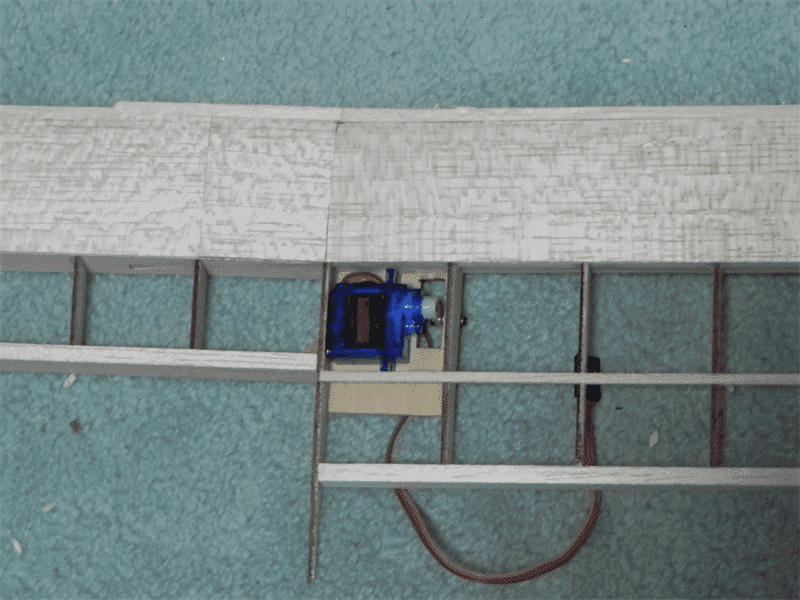
↑モーターの取り付けボックスを枠M1~4で作りはめ込みます。

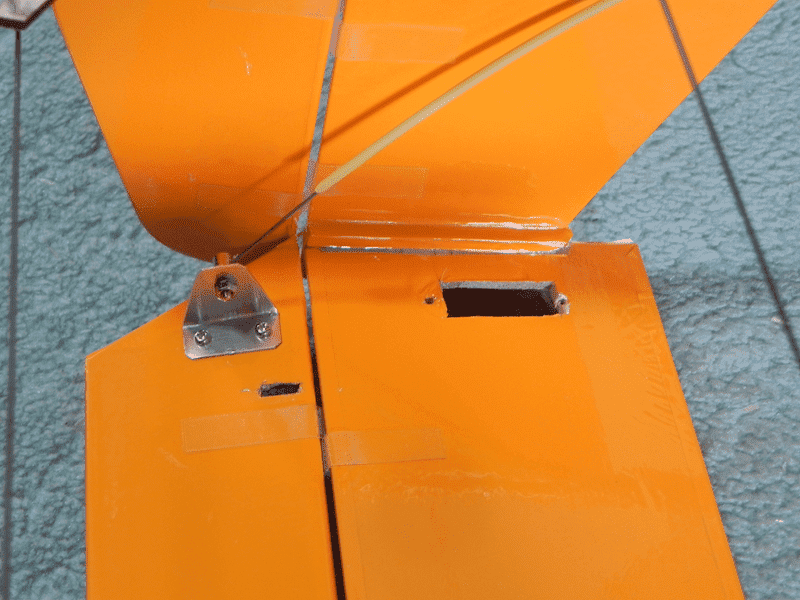
↑垂直尾翼と水平尾翼組み立ててから取り付けます。水平尾翼は主翼の下弦と平行になるように注意します。
↑カーボンパイプに取り付け,2×7㎜バルサで補強します。

↑1㎜カーボンロッドで補強します。
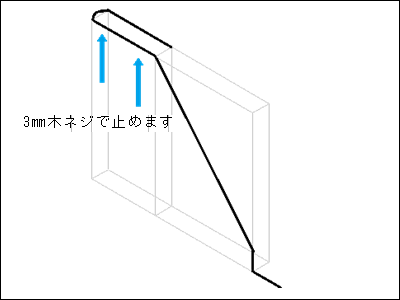
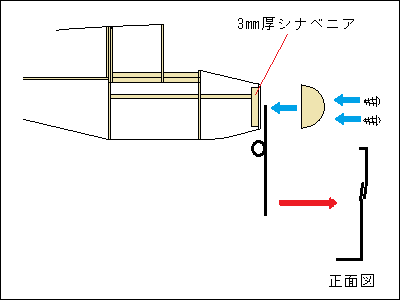
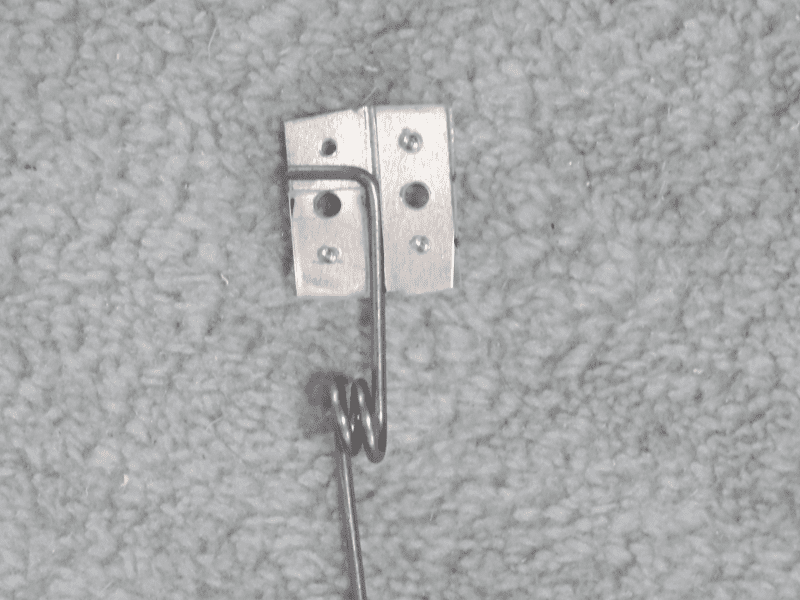
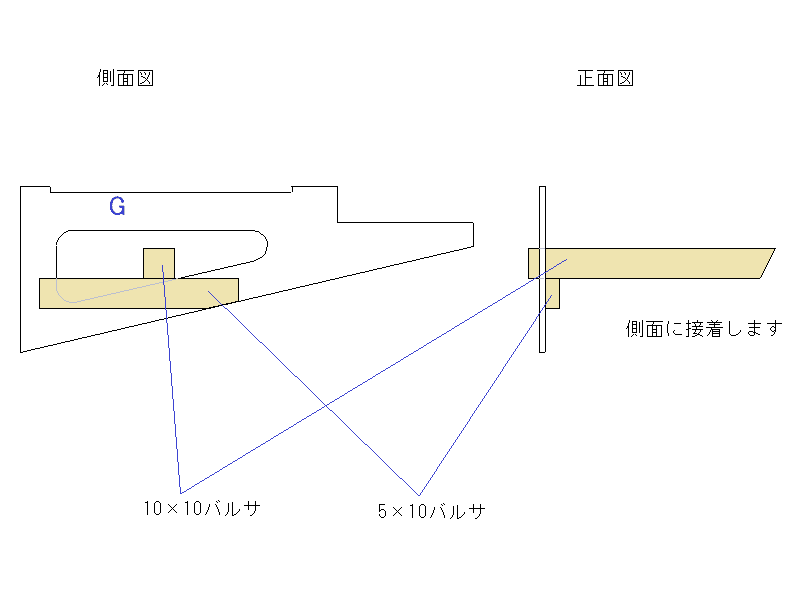
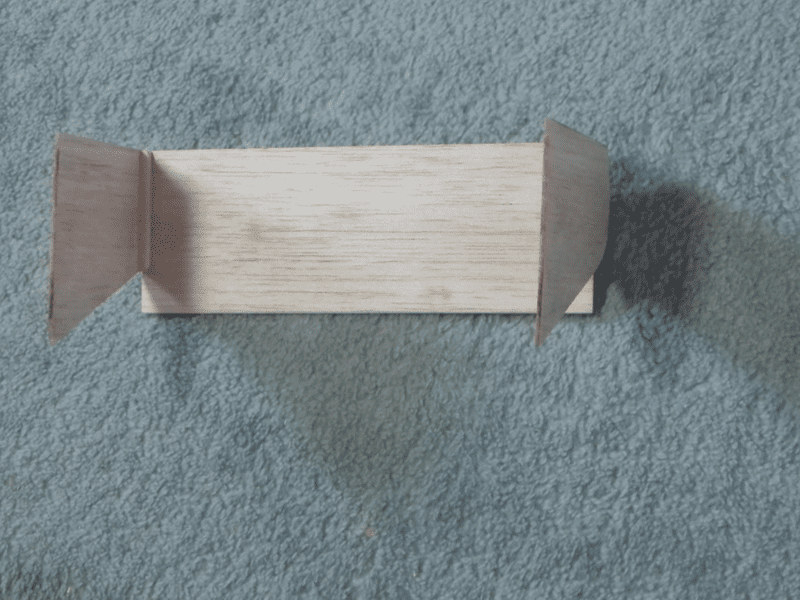
↑先端部分のブロックを作ります。バルサブロックよりも残り物のバルサを組み合わせました。 胴体側は5㎜厚バルサで幅10㎜の溝を作ります。枠Aに前輪を止めるためのビスナットのペースです。

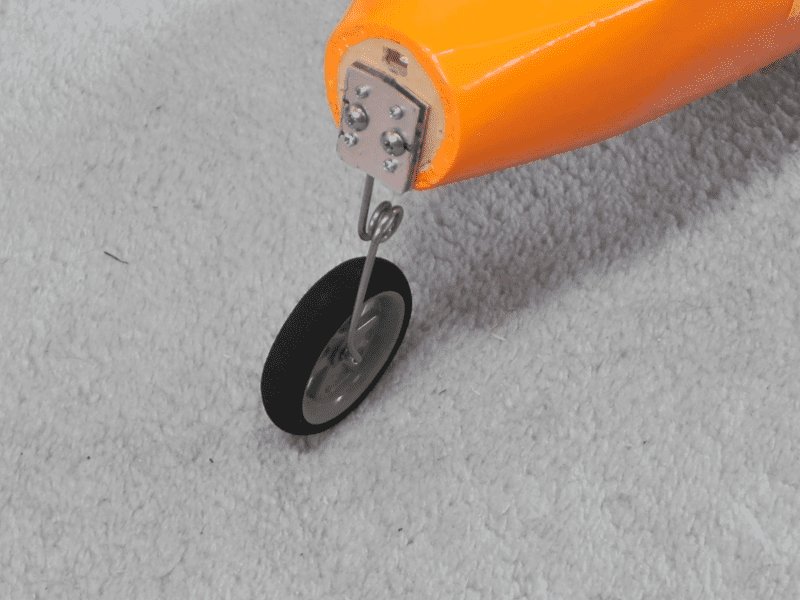
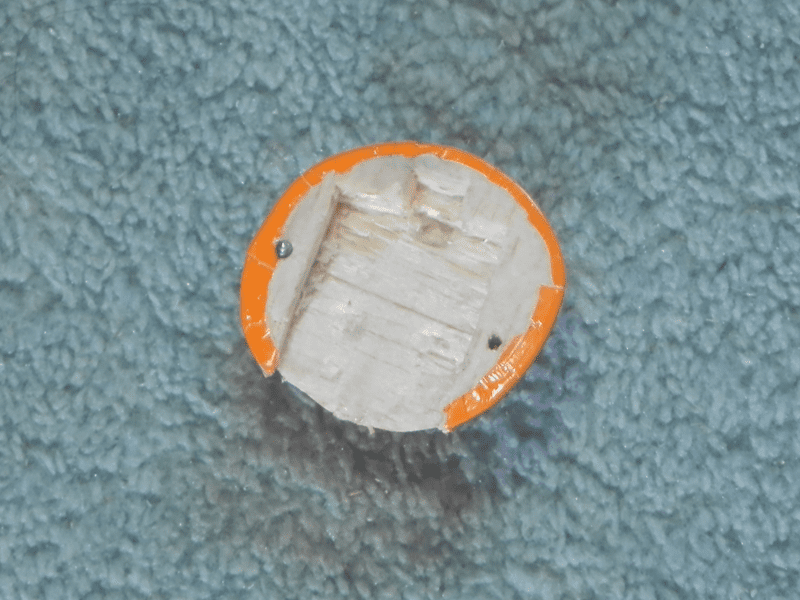
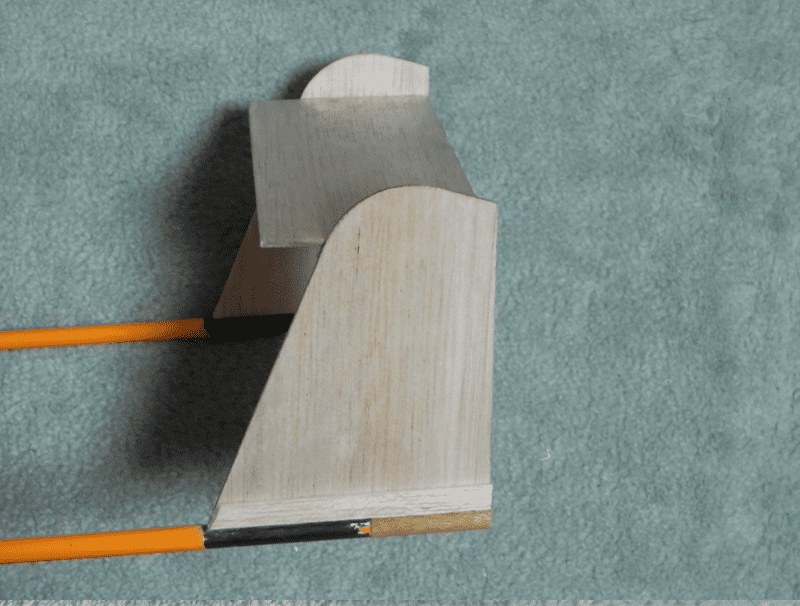
↑両面テープで仮止めしてサンドペーパーで整形します。この部分は2㎜木ネジで止めて取り外し可能にします。
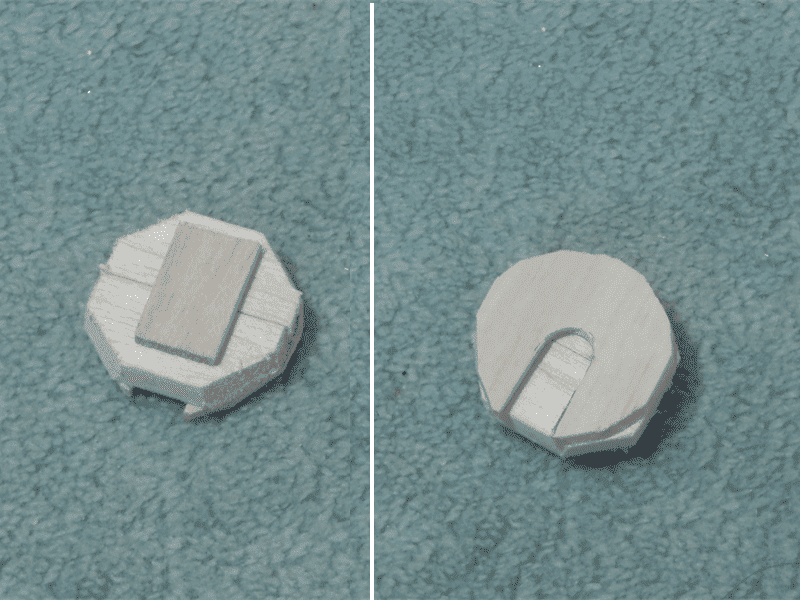
↑主翼をゴムで止めるためのカーボンパイプを取り付けます。前方のパイプです。

↑後方のパイプです。両パイプともエポキシ樹脂接着剤でしっかり止めます。