↑北半球では振り子の振動面は地上から見て右周りに回転します。
ジャイロとは
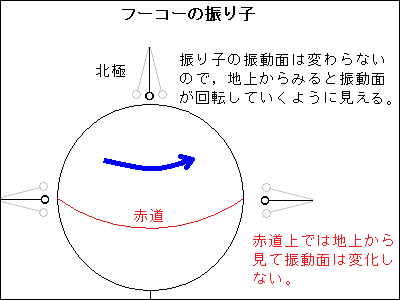
ジャイロの原理 有名なフーコーの振り子の原理がもとになります。
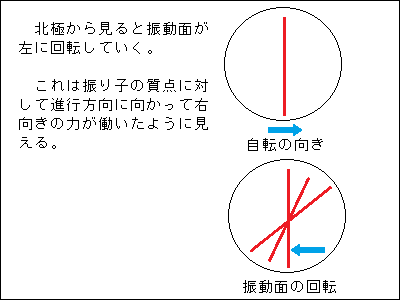
↑北半球では振り子の振動面は地上から見て右周りに回転します。
回転する座標系で,進行方向に対して直角方向に働く力を転向力(コリオリの力)と呼びます。台風の風も右にそれながら中心に向かうので北半球では左回りの渦ができます。 地球を飛行機に振り子を振動体に置き換えればこの振動体にも転向力が働き,捻じれが生じます。この捻じれを測定すれば飛行機の回転の角速度が分かり,積分して角度が分かります。 いろいろ方式がありますが,代表的なものに静電容量方式のMEMSジャイロセンサーがあります。シリコンを微細加工したミリ単位の構造です ●MEMS = Micro Electro Mechanical Systems
飛行機用一般的ジャイロ 一般に「ジャイロ」と呼んでいるのは,機体の傾きを検知し,サーボを動かして補正するシステムで「フライトコントローラー」と呼ぶのが正しいと思います。 機体の傾きを検知する素子を「振動ジャイロ」と言います。振動(回転)している物体には向きが変わると転向力が働き,傾きを検知します。カメラの手振れ防止,スマホの画面の回転,車の運転サポートなどいろいろなところで使われています。このことから「フライトコントローラー」のことを「ジャイロ」と呼ぶのでしょう。
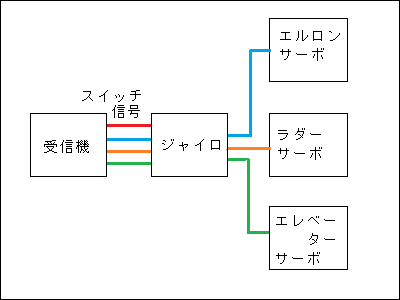
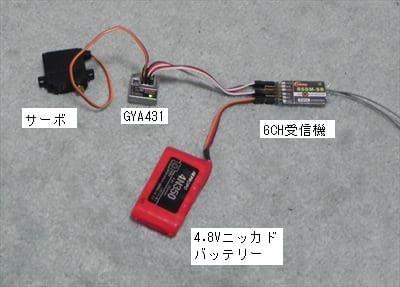
上図のように受信機とサーボの間に入れて使用します。受信機とジャイロの間の通信がサーボと同じ50HzのPWMで通信するタイプであれば汎用性がありますが,高速通信するタイプやS.BUS接続するタイプもあります。特にFutabaのジャイロはFutabaでしか使えません。また,カー用,ヘリ用もあるので購入には注意が必要です。 汎用性のある3軸(エルロン,エレベータ,ラダー)ジャイロで安価なものには次のようなものがあります。
| DUALSKY FC151 | 6軸ジャイロ | スイッチ有り |
| Bigaole 3G-A | 3軸ジャイロ | スイッチ有り |
| Bigaole 3G-A2 | 3軸ジャイロ | スイッチ有り |
| HobbyEagle A3-L | 3軸ジャイロ | スイッチ有り |
| NX3 V1.0 | 3軸ジャイロ | スイッチ有り |
| P1-gyro | 3軸ジャイロ | スイッチ有り |
モードの切り替え 上に示したジャイロは送信機の3ポジションのトグルスイッチで3つのモード,通常のジャイロモード,飛行姿勢の維持モード,ジャイロのOFFモードを飛行中に切り替えられます。 各社モードの呼び方にいろいろあります。 通常のジャイロモード → ノーマルモード → ノーマルスタビライザーモード → レートモード 飛行姿勢の維持モード → ロックモード → AVCS → 3Dモード

↑送信機の設定でトグルスイッチの信号は変えられます。
モードとジャイロの働き OFFモード ジャイロは働きません。すべての操作は送信機のスティック操作です。 ジャイロの設定を間違えたときや動きがおかしいときは直ぐにOFFにできます。これで助かったこともあります。 ⑵ 通常のジャイロモード 風などの外乱に対してジャイロが補正します。非常に飛ばしやすくなります。風で傾いたときスティック操作は必要ありません。滑らかに飛びます。ただし,強い風で流されるのは補正できません。 ⑶ 飛行姿勢の維持モード 飛行姿勢の維持モードに切り替えたときの姿勢を維持します。 すべてのスティックがニュートラルのときスイッチを入れたほうが無難です。 スイッチを入れた状態でスティックを動かしてニュートラルに戻しても各舵は直ぐには戻りません。飛行姿勢がスティックを動かした分向きを変えるまでゆっくりと戻ります。その間他の舵は姿勢を維持するように動きます。自立安定性のある機体などはかえって使いづらいと感じます。 唯一便利なのは滑走と離陸のときで,ラダーの補正などする必要がなく見事なまでに一直線で上昇します。
用語解説 ●6軸ジャイロは3軸ジャイロセンサー+3軸加速度センサーです。 ●ジャイロは「オートパイロット」「スタビライザー」と呼ばれることもあります。 ●使用する送信機と受信機で使えるかどうか十分検討して購入する必要があります。 ネットで「ジャイロ名 "送信機名"」で検索し,使った方の情報を確認できます。 (2語目は1語目とスペースを開け,ダブルクォーテーションで囲みます。) ●Futabaのジャイロはfutaba製品にしか使えません。 ●MEMS(メムス,Micro Electro Mechanical Systems)とは機械要素部品,センサ,電子回路を一つのシリコン基板に集積化したデバイスです。このデバイスはいくつかのジャイロで共通に使われているようです。 ●新しいジャイロは安くて3,000円ほどですが,旧型(1年前など)はBangoodなどでは1,000円台で買えます。これで十分です。
送信機のスイッチ設定
ジャイロのスイッチ 3軸ジャイロはほとんどスイッチ付きです。空きチャンネルのAUXやGEARチャンネルをスイッチとして使用します。従って6チャンネル(5チャンネルは多分市販されていないので)以上の受信機が必要です。送信機側のスイッチはON,OFF,ONの3ポジショントグルスイッチ(3セクションスイッチ)があれば良いのですが2ポジションでも使えます。 何よりも飛行中にスイッチを切り替えられるのは最高です。
モードの切り替えには送信機から次の信号(パルスの幅)を送ってモードを切り替えます。 モード① 1,720μs(ロック) モード② 1,520±200μs(OFF) モード③ 1,320μs(ノーマル) この数値はBigaole 3G-Aカタログのデータですが,モード①とモード②にもある程度の範囲があるのではないかと思います。
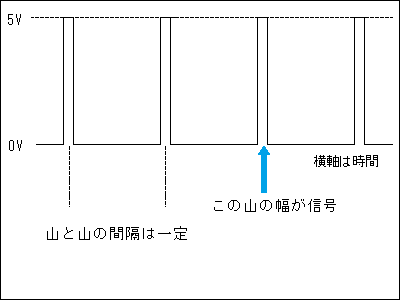
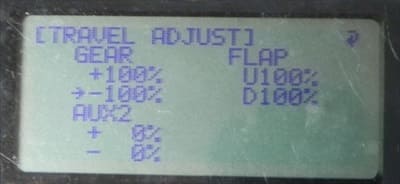
↑制御信号(PWM)のイメージ図。パルス幅は送信機のTRAVEL ADJUSTで変更できます。中心は1,500μsです。
サーボの動作範囲の信号幅をおよそ 1,500μs±400μs(1,100~1,500~1,900μs) と考えれば。送信機の「TRAVEL ADJUST(=END POINT)」で1,100μsが-100%,1,900μsが+100%となり モード① 55%(ロック) モード② 0%(OFF) モード③-45%(ノーマル) となります。 テストした結果は多めの比率(±%100)の設定が良いようです。上記の比率は境目になっていました。
送信機の設定 送信機の2ポジションのトグルスイッチを使う場合は①(ロック)と③(ノーマル)の組み合わせになります。
●送信機のAUX1~3やGEARチャンネルがONとOFFの2ポジショントグルスイッチの場合,「NX3ジャイロ」はロックとノーマル2つのモードしか選択できません。 ●Travel Adjustment=End Point Adjustmentです。
送信機の設定⑵ JRの送信機XG7の3ポジショントグルスイッチはチャンネル6にフラップシステムとして登録してあります。フラップ用のサーボに信号が送れるので当然ジャイロにも信号を送れます。

送信機の表示が±ではなくてUPとDNで表示されます。上の写真でUP100%を+100%,DN100%を-100%と読み替えます。テストの結果は正確に切り替えわります。 ●スイッチの設定は OFF(0%)⇔ ノーマルモード(-100%)⇔ ロックモード(+100%) の順または逆順にします。 ノーマルモード ⇔ OFF ⇔ ロックモード のようにすると OFF ⇔ ロックモード の切り替をしたらいけないジャイロ(NX3ジャイロ)があります。NX3は必ずノーマルモード経由でロックモードにします。 複数の機体で複数のジャイロを使う場合,機体によってスイッチの位置とモードが異なると困るので,NX3に合わせています。
共通注意事項
ミキシング機能の解除 送信機のデルタウィングまたはVテールミキシング機能は絶対に使用しないこと。また,他のミキシング機能もすべてOFFにします。ジャイロが行います。 どこかにミキシングが入っていると正しくモード切り替えができません。
トリムとサブトリム 初期設定でほとんどのジャイロでサブトリムを0にするように指示があります。トリムについても0にするように指示されている場合もあります。できるだけリーケージで調整しておきます。 初期設定では常にトリムやサブトリム0にしておけばどのジャイロでも気にせず初期設定できます。 初期設定後トリムやサブトリムを調整した場合は,中立位置をジャイロに記憶させるためにキャリブレーション(校正)が必要です。
電源の入れ方 電源を入れる前に機体を水平な場所に置き,送信機のエルロン,エレベーター,ラダースティックをセンターにします。また,送信機のトルグスイッチは中立(ジャイロはOFF)にしておきます。 電源投入後にまずESCのチェック音が鳴ります。続いてジャイロの初期化が行われ,一度エルロン,ラダー,エレベーターが振れて元に戻ります。この間10秒ほどかかります。 モード切り替えスイッチを動かして切り替えわるか確認します。LEDで確認できます。 ロックモードにしたとき舵が動く場合はキャリブレーション(後述)が必要です。 ※初期設定,リバース設定,機体モデルの選択のときは電源の入れ方がジャイロにより異なります。マニュアルに従います。
また,飛行前に静止状態でトリムを調整し,モードを切り替えて舵が動かないか確認が必要です。特にロックモードで舵が動くときはキャリブレーションが必要です。 キャリブレーションはスイッチを素早く数回切り替えます。 飛行中にトリムを調整した場合は,通常のジャイロモードでは関係ありませんが,ロックモードは調整前のセンター位置のままです。降ろしてからキャリブレーションが必要です。
ジャイロの方向確認 ロックモードで確認した方が分よく分かります。 ロックモード(AVCS)にして機体を傾けてジャイロの働きが正しい方向かどうか確認します。 逆に動く場合はジャイロ自体のリバースの設定が必要です。リバース設定はジャイロによって方法が異なるのでマニュアルに従います。 ※ジャイロの取付で,前後,上下を入れ替えたときにリバース設定が必要です。 ※送信機でのリバース設定はスティック操作と舵の動く方向の設定です。ジャイロの補正方向とは関係ありません。
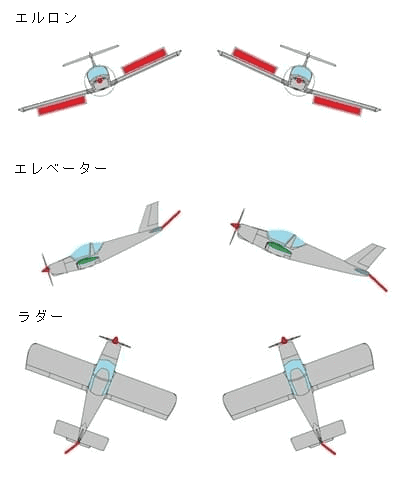
↑傾きを元に戻す向きに舵が動きます。
キャリブレーション(校正) 最初の設定,トリムの変更,サブトリムの変更のあとは中立位置をジャイロに記憶させるためにキャリブレーションが必要です。 キャリブレーションは送信機のモード切り替えスイッチを素早く2~3回動かします。 他にも電源投入後にスティック位置0で,モードを切り替えたとき舵が動くようならばキャリブレーションが必要です。
飛行時間 自動で姿勢制御するので勝手にサーボが動きバッテリーを消耗します。飛行時間に注意が必要です。 また,サーボとリンケージにも負荷がかかります。飛行前の点検を十分行う必要があります。
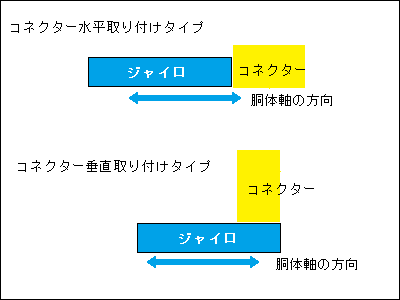
取り付け位置と方法 機体に水平に取り付けます。垂直に取り付けるとエレベーターとラダーの補正が入れ替わります。 前後,上下(裏返し),左右は入れ替えてもかまいませんが,初期値のまま使えないのでリバース設定が必要です。リバース設定は結構面倒なものもあるのでできるだけ入れ替えない方が設定は楽です。
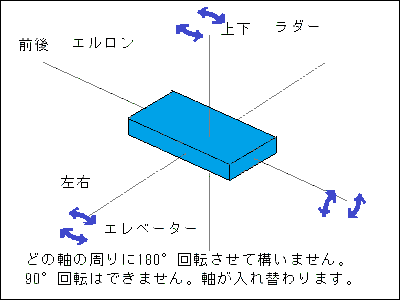
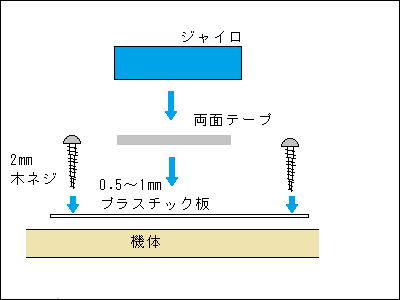
●180°回転はできますが90°回転はできません。上図の例で前後軸の周りに90°回転させるとラダーとエルロンが入れ替わってしまいます。 そもそも水平にしてスイッチを入れないと認識しません。 ただし,HobbyEagle A3-Lは90°回転可能ですが,設定が必要です。 取り付けは後で外すことも考慮して下図のようにプラスチック板を使っています。
コネクターの位置 ジャイロの大きさだけでなくコネクターの位置により取り付けスペースに大きな差ができます。コネクターの先のコードもスペースが必要です。機体の取り付け位置のスペースによっては考慮する必要があります。
取付例 参考にしてください。取り付け場所は可能な限り重心付近です。 取付後に感度調整,ディップスイッチの設定ができること,LEDの点灯,点滅が確認できることが大切です。
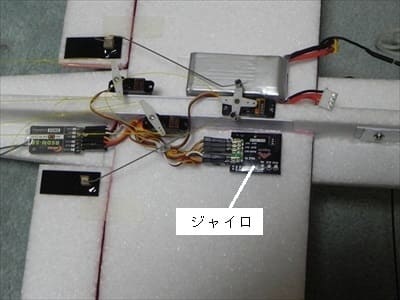
↑EPP機にBigaole 3G-Aを取り付け。露出しています。

↑高翼機にNX3を取り付け。主翼を外して設定します。

↑高翼機にP1-gyroを取り付け。胴体下から設定します。 スペースがなくてサーボの下に少し改造して取り付けました。コネクター垂直タイプは取り付けできません。

↑モーターグライダーにHobbyEagle A3-Lを取り付け。コネクター垂直タイプは取り付けできません。
サーボとの相性 サーボとの相性がたまに生じるようです。 P1-GyroとBigaole 3G-A(3軸ジャイロ)でウイングサーボE-MAX ES3301のセンターをどうしても認識しませんでした。NX3ジャイロは認識しました。 P1-GyroとBigaole 3G-Aは同じICデバイスを使っているようです。
BEC供給電力の確認 マニュアルにはありませんがとても重要です。 送信機のスティックを操作しなくても機体の動きによりジャイロはサーボを動かします。特に急激な機体の動きに対してはすべてのサーボを動かします。このときもしESCのBEC(電力供給)の能力を超えて電圧低下が起こればジャイロは働かなくなります。送信機でジャイロをOFFにしても,サーボはジャイロ経由なので,スティックを操作しても受け付けません。回復までは10秒程度かかりその間コントロールできなくなります。 BECの能力が十分かどうかはバッテリーを繋ぎ,ロックモードでジャイロを取り出していろいろ動かしてみます。もし電力の不足が生じればジャイロは動作をやめるので直ぐに分かります。 この現象が生じたときは10V2,000μFほどの電解コンデンサを電源回路に並列に入れると解消できます。電源回路に並列に入れるには受信機の空きチャンネルにコネクターで繋ぎます。このコンデンサは市販されていますが自作も簡単です。
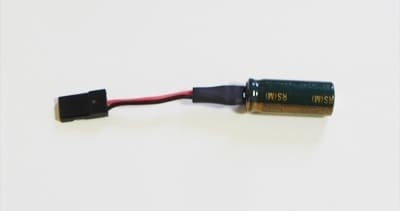
↑16V3,300μF電解コンデンサ HobbyEagle A3-Lに付属していたもの。
↑p1-gyro の例です。ロックモードでジャイロを急に動かすと初期化モードになってしまいます。 16V3,300μFの電解コンデンサを受信器の空きチャンネルに入れば解消されます。
Bigaole 3G-A(3軸)
Bigaole 3G-Aにつて Bigaole 3G-Aはエルロン,エレベータ,ラダー用の3軸ジャイロです。空きチャンネルのAUXやGEARチャンネルをスイッチとして使用します。従って6チャンネル以上の受信機が必要です。
仕様
| サイズ | 22mm×31mm |
| 重量 | 7.5g(ケーブル含む) |
| 動作電圧 | DC3.5~9V |
| 動作電流 | 20mA |
| 動作環境 | -15℃~65℃ |
| 最大角スピード | 800°/s |
| 適用サーボ | 1.52ms アナログサーボ |
| 1.52ms デジタルサーボ |
※1.52ms(1,520μs)は通常のサーボです。
配線とモード切り替え 配線の前にジャイロをつながない通常の状態で各サーボの動きを確認します。必要ならば送信機のリバース設定しておきます。 上の写真の左または右を機体前方に向け機体に水平に取り付けます。裏返しでも構いません。結線は取り付け前が作業は楽です。


↑配線図。電源は共通なので受信機のエルロンスロットからとっています。残りは信号だけで済ませられます。
スイッチの切り替えで次の3つのモードが指定できます。 モード① ロック(AVCS) モード② OFF モード③ ノンロック ※ AVCS(Active Anguler Velocity Control System)はスイッチをONにした時の状態まで機体が戻るように補正します。 ※ノンロックは通常のジャイロの動作です。
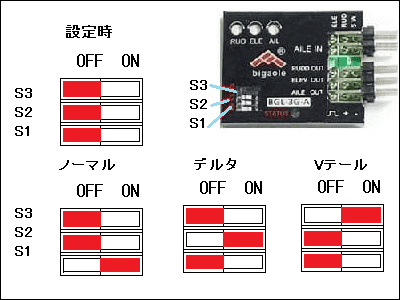
初期設定 送信機の電源を入れます。このときモードはジャイロOFFを選択します。スティックはニュートラルです。 ⑵ジャイロのスイッチS1,S2,S3をOFFにします。 ⑶機体を水平にしてバッテリーをつなぎます。 ⑷赤と青ランプが同時に1回フラッシュ,続いて青ランプが何回かフラッシュ,1秒後に青ランプが1回フラッシュして消えれば設定終了です。直ぐにバッテリーを外します。 バッテリーを外さないと5秒後に「リバースの設定モード」に入ります。 ⑸ジャイロのディップスイッチを機体モデルに合わせてONにします。(ノーマルの飛行機の場合S1をON。「ディップスイッチの設定」参照) ⑹バッテリーをつなぎ,ジャイロの働きが正しい方向かどうか確認します。
●ロック(AVCS)にしたとき,ラダーとエレベータが中立にならず最大舵角になる場合があります。その場合,送信機のジャイロ切り替えスイッチを数回手早く切り替えると中立を再認識します。 また,「TRAVEL ADJUST」の設定量が少なくても同様の現象が起こりました。±100%でこの現象はなくなりました。(JRだけかもしれませんが) ●ジャイロの取り付け方向によってはジャイロのリバース設定が必要になることがあります。リバース設定が必要な時は再度 からやり直して⑷でバッテリーを外さずにいると5 秒後にリバースの設定モードに入ります。 リバース設定が終わったらディップスイッチを機体モデルに合わせてONにします。(元に戻します。)
リバースの設定モード ジャイロの働く方向が逆の場合,ジャイロ自体のリバースを設定します。 ジャイロの設定モードでバッテリーをそのままにしておくとリバース設定モードに入ります。パイロットランプが赤青同時に2回フラッシュしてリバース設定モードが開始されたことを示します。 その後次の①~③を繰り返します。その間に送信機のラダースティックをどちらかに倒して設定します。 ①~③のフラッシュの色は,青はノーマル,赤はリバースを示します。 ①~③を永遠に繰り返すので終わったらバッテリーを外します。 ①毎秒1回フラッシュを5回繰り返す→エルロン修正 ②毎秒2回フラッシュを5回繰り返す→エレベータ修正 ③毎秒3回フラッシュを5回繰り返す→ラダー修正
ディップスイッチの設定
テスト飛行 ジャイロをOFFにしてバッテリーを繋ぎます。ESCが認識するまでラダーやエレベーターが触れますが,ESCの認識が終われば(音楽?が終われば)ニュートラルに戻ります。 ⑵飛行機を動かさないでジャイロのモードを切り替えて確認します。 このときモードモード①(AVCS)にしたとき勝手にラダーなどが動くときは,ジャイロ切り替えスイッチを数回手早く切り替えると中立を再認識します。(電源を投入するたびに起こることもあります。) 何回か切り替えてモード切り替えでテストしてエルロン,エレベータ,ラダーが動かないことを確認します。 ⑶ジャイロをOFFにして送信機のスティックを動かしてエルロン,エレベータ,ラダーの動きを確認します。 ⑷モード①(AVCS)で機体を動かしてジャイロの働きを確認します。 ⑸ジャイロをOFFにして上空まで上げ,ジャイロのスイッチを入れて様子を見ます。異常があればすぐにOFFにします。 正しく動作したら次回からはすきなモードで飛行を始めれば良いでしょう。 ⑹飛行中にモード①(ロック=AVCS)に切り替えると頑固にその姿勢を維持しようとします。解除はモード②(OFF)かモード③(ノンロック=通常のジャイロモード)に切り替えます。
重要事項 1. 送信機内で全翼機またはV尾翼の混合が無効になっていることを確認します。3G-Aにはすでにこれらの機能が備わっています。 2 3G-Aは,送信機内でトリムまたはサブトリムを変更した後,中央位置を再学習する必要があります。そうしないと,AVCSモードに切り替えるときにサーボが左端または右端に移動する場合があります。 これを正常にするには,フライトモードスイッチを1秒間に通常モードとAVCSモードの間で2~3回すばやく切り替えてください。
使用例 スチレンボード機に取り付けてみました。ノーマルのジャイロモードでテスト飛行しましたが,ON,OFFではっきり違いました。ONでは急に上手くになったように錯覚します。離着陸もとても楽です。
↑尾輪式なので置いたとき機首を上げた状態です。その状態でジャイロをロックモードにして離陸しました。
スロットル以外の操作はいりません。真っすぐ上昇していきます。上昇したところでのジャイロをノーマルモードにしました。
▶Bigaole 3G-Aのマニュアル(ラジコン1 ) ▶ラジコン1(日本ビネガーボトラーズ)佐賀県 ▶Bigaole 3G-A V2のマニュアル(英文pdf ) ●購入先 ▶ラジコンプラモデル ヘリポート 宮崎県 こちらにもあります ▶R/Cネットショップ ロビン 東京都日野市 両店とも2,980円です。
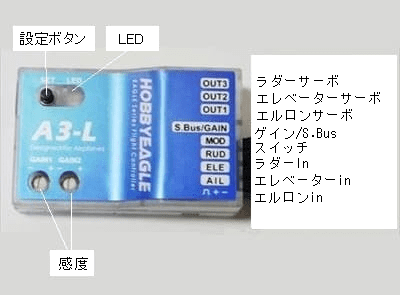
HobbyEagle A3-L(3軸)
HobbyEagle A3-Lについて エルロン,エレベータ,ラダー用の3軸ジャイロです。空きチャンネルのAUXやGEARチャンネルをスイッチとして使用します。従って6チャンネル以上の受信機が必要です。 ●FutabaのS.Busにも対応しています。 左右(上図参照)を90°回転させられます。ただし,感度は別個(軸ごと)に設定できません。
仕様 仕様(Specifications) 入力電圧:5.0~8.4V サーボ信号:1520±500μs(※通常のサーボです) ジャイロスコープ:±2000dps(※反応速度です) 使用温度:-40℃~85℃ サイズ:43×27mm 重量:11g(コードと両面テープを含め19g) ※dpsはdegree per second(°/秒)です。
特徴(Features) 3つの飛行モード:通常,3D飛行,ジャイロオフモード。 3つの翼タイプ:標準,デルタ翼(全翼機)およびV尾翼。 サーボの3つの動作周波数:50Hz,125Hz,250Hz(※普通は50Hzです。) フライトモードごとに個別のゲイン調整。 自動スティックセンタリング。 HV(8.4V)動作電圧をサポート。 Futaba S.Bus / S.Bus2 対応。 ●受信機とジャイロの間がS.Bus,S.Bus2接続可能ということで,出力は一般的なサーボ用のPMW信号です。 ●サーボについては一般的なアナログサーボかデジタルサーボです。 ●通常のサーボの動作周波数は50Hzですが,ハイスピードサーボの設定はマニュアルに未記入です。自動判別なのでしょうか?
配線
上図のように配線します。 JR XG7 は3ポジションスイッチがチャンネル6なので受信機のチャンネル6をFlight Mode(MOD)に接続します。チャンネル6を+100%,0,-100%に設定するのを忘れないようにしてください。(複数のジャイロを使用しているので+100%,-100%,0にしています。)
初期設定 起動するたびに自動的にスティックセンタリングを実行します。 ①電源を入れる前に,エルロン,エレベーター,ラダースティックをセンターにします。また,送信機のトルグスイッチは中立(0% ジャイロOFF)にしておきます。 ②電源を入れるとジャイロからメロディーが流れます。 ③セルフキャリブレーション(調整・初期化)をします。LEDは青ですばやく点滅し続けます。(約3秒間) ●初期化が完了するまで飛行機と送信機のスティックを動かさないでください。 ●飛行前にジャイロが正しい方向に反応することを確認することは非常に重要です。そうしないと,飛行中にコントロールを失ったり,クラッシュしたりします! ●受信機の種類を変更した後,ジャイロを再起動して,新しい設定を有効にする必要があります。 ●送信機のデルタウィングまたはVテールミキシング機能は絶対に使用しないでください。 ●A3は5.8.4Vの広い動作電圧に対応しており,HVレシーバーまたはサーボを直接使用できます。
送信機側の3ポジショントグルスイッチでモードを切り替えます。LEDの色とジャイロモードは次のようになります。 ブルー → ノーマルスタビライザーモード 未点灯 → OFFモード レッド → AVCSモード
設定変更 各種設定変更はボタンを押して「機能選択モード」に移行して行います。ウイングタイプもディップスイッチではなくてここで行います。 ①「機能選択モード」に入るにはボタンを2秒以上押し続け(長押し)LEDが青と赤に点滅し始めたら離します。 ②LEDがN回青と赤に点滅します。Nは設定機能の番号です。(何回も繰り返します。) ③操作したい機能に到達したら,ボタンをすばやく1回(短押し)押し,「設定モード」に入ります。 「設定モード」に入るとLEDの色に現在選択されている設定が表示されます。現在の設定とLEDの色は下表を参照してください。ボタンを短く押すたびにオプションの次の値に進めます。何回も押せば繰り返します。 ④「設定モード」から抜けるには5秒間待ちます。「機能選択モード」に戻ります。 ⑤「機能選択モード」でもう一度ボタンを長押しして終了します。
| 点滅 | 設定モード | 青 | 赤 | 青と赤 |
| 1回 | ウイングタイプ | 標準 | Delta | V-Tail |
| 2回 | エルロンRevers | N | R | |
| 3回 | エレベーターRevers | N | R | |
| 4回 | ラダーRevers | N | R | |
| 5回 | サーボ周波数 | 50Hz | 125Hz | 250Hz |
| 6回 | 受信機タイプ | 標準 | S.Bus | S.Bus2 |
| 7回 | 取り付け方向 | 水平 | 直立 |
※青がデフォルトです。N=Nomal,R=Revers
感度調整 通常のゲイン(基本ゲイン)(GAIN1),すべての飛行モードで有効になります。これはジャイロの最も基本的な機能です。とにかく0%にしないでください。 GAIN2についての説明がマニュアルありませんが,ロックモードの感度ではないかと思います。

電解コンデンサーについて 耐電圧16V容量3,300μFのコンデンサーが付いていました。ESCのBECが5Vなので空きチャンネルにつなぐと 電気量=電圧×容量=5×3.3×10-3=1.65×10-2(C)の電気量を蓄えます。 この電気量でサーボを動かすのは無理です。これは回路の電圧変動を少なくする働き,電源回路における平滑コンデンサーの働きをすると思います。
その他 ▶HobbyEagle A3-Lマニュアル(pdf英文) 「EAGLE A3-L」で検索しても日本国内ではあまり販売されていません。中国の「bangood」で購入できます。「bangood」はコンビニ決済ができて便利ですが,届くまで30日程度かかります。 ●購入先 メルカリで2,222円(税込送料込み)で購入しました。
NX3(3軸)
NX3について NX3はエルロン,エレベータ,ラダー用の3軸ジャイロです。空きチャンネルのAUXやGEARチャンネルをスイッチとして使用します。従って6チャンネル以上の受信機が必要です。 「Lanxiang NX3」,「Blitzrcworks NX3」,「MAT TECH NX3」,「EMAX NX3」などいろいろありますが,webで写真を比べるとすべて同じに見えます。「EMAX NX3」はケースがプラスチックでありません。 本家本元は「Lanxiang NX3」ではないかと思います。(下にリンク先があります) 「Blitzrcworks NX3」については中国最大のB2B電子市場(made-in-china.com)に「Blitzrcworks Factory」名で登録してあります。OEM製品などを製造しているのではないかと思います。 2020年から「NX3 rev」と「NX3 pro」が新しく販売されています。 「NX3 pro」は今までの「NX3」と変わらないようですが,「NX3 evo」は6軸ジャイロとなり,他が6.5gなのに対して11gと重くなっています。また,コネクターが水平です。フライトモードが1.初心者,2.練習,3プロモーション,4.エキスパート5.緊急モードとなっています。 ここではpro,evo以外の「NX3」についての説明です。2,000円程度で手に入るので試して見るのに適していると思います。 ※B2B(Business to Business)はインターネットを使った企業間取引です。
仕様 入力:DC5-6V 電流:18mA 動作温度:-20℃-85℃ サイズ:25×40mm 重量:6.5g モード オフモード レートモード(通常のジャイロモード) ホールドモード(ロックモード) サポート デルタ翼 Vテール デュアルエルロン,フラッペロン
重要事項 次のような時はサーボの中心位置を記憶させる(キャリブレーション:校正)必要があります。 ・ジャイロを取り付けたとき ・受信機を新しくしたとき ・送信機でトリム調整(送信機のスティックの周りにあるスライドレバー)やサブトリム調整をしたとき そうしないとホールドモードに切り替えたときにサーボが自動的に片側に移動する場合があります。 キャリブレーションは飛行モードスイッチをレートモードとホールドモードの間で1秒以内に3回切り替えます。 ●最初の設定でトリムやサブトリムについての記載(注意事項)はありません。 ●トリム調整は飛行中に行うことが多いと思います。トリム調整後にロックモードにするときには注意してください。
LEDとモード LEDオフ :オフモード LED点灯 :レートモード LEDフラッシュ:ホールドモード ※LEDはジャイロに「STATUS」と表示してあります。
取り付け ボードは,両面テープを使用して重心近くにしっかりと固定します。ボードの長辺が進行方向に沿っていることを確認します。
配線 ジャイロと受信機,サーボを繋ぎます。ワイヤーの色に注意して+-を間違えないようにしてください。「AUX-IN」はスイッチです。送信機の3ポジションスイッチのチャンネルに繋ぎます。
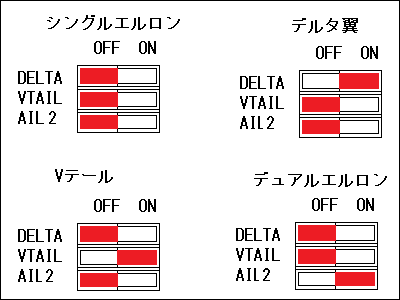
初期設定 このジャイロの初期設定は機体モデルの選択(ウイングタイプの選択)だけです。 機体のウイングタイプに合わせてディップスイッチを設定します。 通常の飛行機(1つの翼) 通常の飛行機でフラッペロン(2つの翼) デルタ翼(フライウィング翼) Vテール ディップスイッチの設定を変更した場合は,電源を入れ直して新しい設定を有効にします。
エンドポイント調整 送信機にエンドポイント調整機能(End Point Adjustment=Travel Adjustment)がある場合は,スイッチチャンネルのエンドポイントを変更してマスターゲインを変更できます。
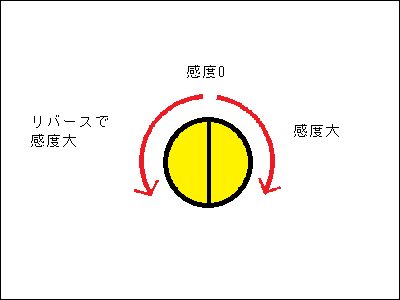
リバースの設定とジャイロゲイン 感度調整ボリュームで設定します。 感度調整ボリュームの中立が感度0で,右に回すと感度が上がります。左に回すとリバースでの感度設定になります。便利です。
ジャイロに中心位置を記憶させるには(キャリブレーション:校正) モード選択スイッチを1秒以内にレートモードとホールドモードを2回切り替えてください。 ●スイッチの順番は オフモード ⇔ レートモード ⇔ ホールドモード の順にしてください。オフモードとホールドモードが直接切り替えわるようにすると前回のホールドモードが消去されずに前回のホールドモードになってしまいます。レートモードと切り替えわるようにしてください。 マニュアルに「2ポジションスイッチを使用する場合,NX3ボードはレートモードとホールドモードの間で切り替えられますが,オフモードに切り替えることはできません。」とあります。ホールドモードとオフモードの切り替えは不可であるということだと考えます。 ●GEARチャンネルは3ポジションスイッチであっても+100,0,-100のようになっていて+100,-100,0のように設定できないと思います。FLAP SYS(フラップシステム)の3ポジションスイッチは可能です。 2ポジションスイッチで オフモード ⇔ レートモード または レートモード ⇔ ホールドモード で使えば良いと思います。ホールドモードはほとんど使うことは無いと思います。
その他 ▶Shenzhen Lanxiang Model Aircraft Co.,Ltd ●購入先 jp.bangoodのコンビニ決済で仲間とともに10個購入しました。 価格は1個あたり1,218円になりました。 2021/02/12日現在1,713円+送料750円+コンビニ手数料100円の合計2,563円です。
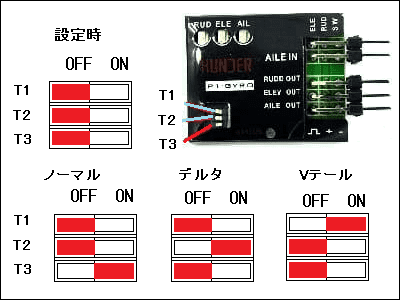
P1-gyro(3軸ジャイロ)
購入を検討しましたが,マニュアルがweb上になく困っていました。最近pdfファイル(画像ファイル)が見つかったので翻訳した後で購入しました。

↑箱入りではなく袋入りです。
●「Bigaole 3G-A」と同等品ではないかと思います。マニュアルを比較すると設定方法,仕様,配置は全く同じです。同じ基板(MEMS)を使っているようです。 ただし,ディップスイッチの名前の順番が逆になっています。 ※2020年に新機種が販売されたので,この型はBangoodで1,183円+送料788円+コンビニ手数料100円の合計2,071円です。届くまで一カ月かかりますが……(複数買っても送料は変わりません)
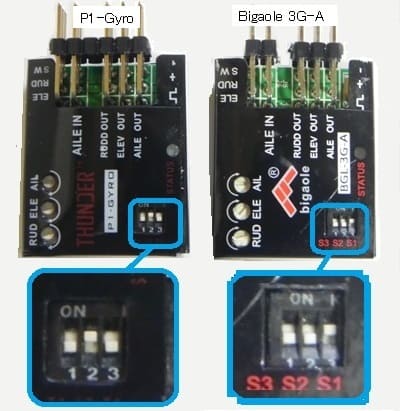
ディップスイッチの設定 ディップスイッチはBigaole 3G-Aと順番が逆になっています。
Futaba GYA431(1軸)
ちょっと古いジャイロで1軸ですが,S.bus接続で3個使用して3軸制御ができます。現在製造中止ですが,オークションなどで手に入ります。4,000円ほどです。後継機は9,000円ほどで,「Futaba製品との組み合わせ以外では使用できません。」と説明があります。 ただし,古いジャイロは他でも使えます。 GYA431はエルロンまたはエレベーター用です。ラダー用はGYA40です。
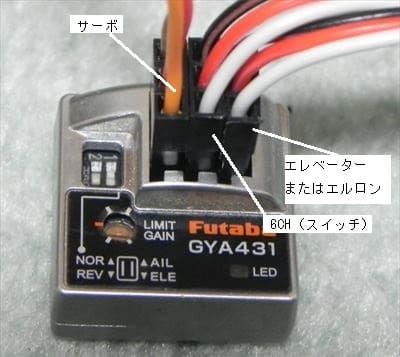
接続
↑機体に取り付ける前にテストしてみました。送信機はJR DMSS です。
↑Ftaba用のコネクターは爪があり差し込みを間違えることはありませんが,JR用のコネクターは爪が無いので+-を間違えないように。(図の下側が+です)
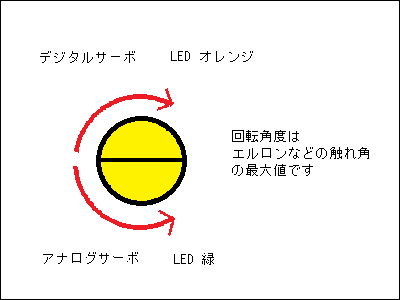
サーボの種類と舵の最大の触れ角を設定 「LIMIT GAIN」のボリュームを回して設定します。
リバースとエルロンまたはエレベーター指定
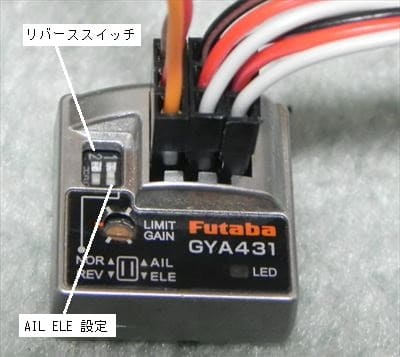
モード切り替えスイッチと感度調整 送信機で,使用するチャンネルの「TRAVEL ADJUST」で調整します。指定した%が感度になります。 ftabaの信号のニュートラル(0%)の信号は1,520μsですが他は1,500μsです。少し影響があるかもしれません。 AVCSモードは赤LED点灯,ノーマルモードは緑LED点灯,OFFモードでは消灯します。
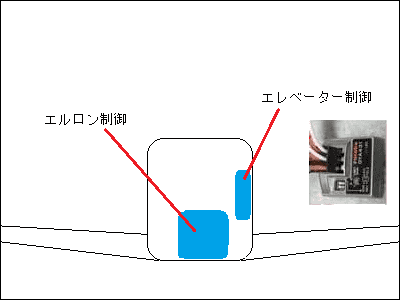
機体への取り付け エレベーターを制御する場合は機体側面に取り付けます。 エルロンを制御する場合は,翼に平行で鉛直な面に取り付けます。
●購入先 昔近くのホビーショップで買ったものを引き出しの隅から発見しました。もったいないので使ってみました。今はヤフオクなどでしか手に入らないと思います。
●いくつかのジャイロを使ってみましたが,NX3の設定が一番楽です。
ジャイロを使うと急に上達したように感じます。![]() 新しい機体をテストするときは必需品になりました。
●マルチコプターやヘリコプター用のジャイロは高速化の要求などからPPMのデジタルシリアル通信をしたり,同じくデジタルシリアル通信のSbusを使ったりしていて互換性が難しいようです。電動飛行機用では互換性のある通常のPMW通信で十分です。また,かなり安価になっています。
新しい機体をテストするときは必需品になりました。
●マルチコプターやヘリコプター用のジャイロは高速化の要求などからPPMのデジタルシリアル通信をしたり,同じくデジタルシリアル通信のSbusを使ったりしていて互換性が難しいようです。電動飛行機用では互換性のある通常のPMW通信で十分です。また,かなり安価になっています。
参考文献など ▶いまさら聞けないジャイロセンサー入門 ▶Dualsky - Shanghai Dualsky Models Co.,Ltd ▶Kyosho KG-2のマニュアル NX3 3軸ジャイロの製造元(中国・広州市) ▶Shenzhen Lanxiang Model Aircraft co.,ltd hobbyking.com ▶NX3 evo 3軸ジャイロのマニュアル(pdf日本語 )