
| ● | 注意 図面などで尾翼に「肉抜き」がありますが,必要ありません。 |
| ● | 詳しい寸法はA0サイズのpdfファイルでご覧いただけます。(最下部図面の項目) |
| ● | 説明不足で分かりにくい部分があると思います。ページ最下部から遠慮なくご連絡ください。 |
| 図や写真,説明文を追加します。 |
胴体の加工

↑枠の位置の概略です。

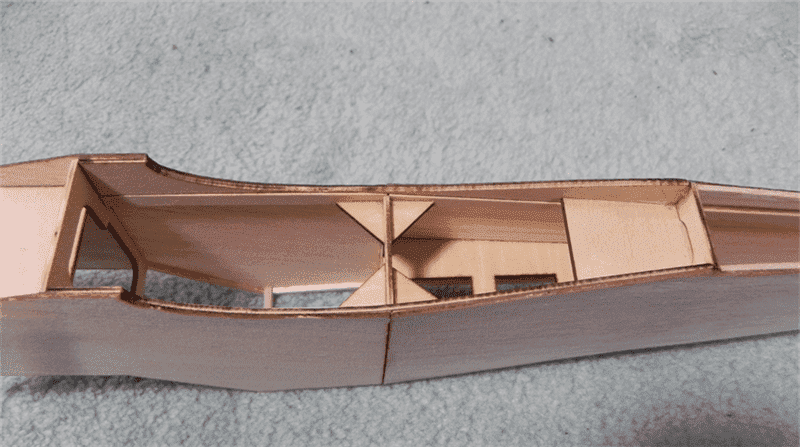
↑2×5㎜ヒノキ(長さ155㎜)と枠Cを接着し,三角補強材Fで補強します。

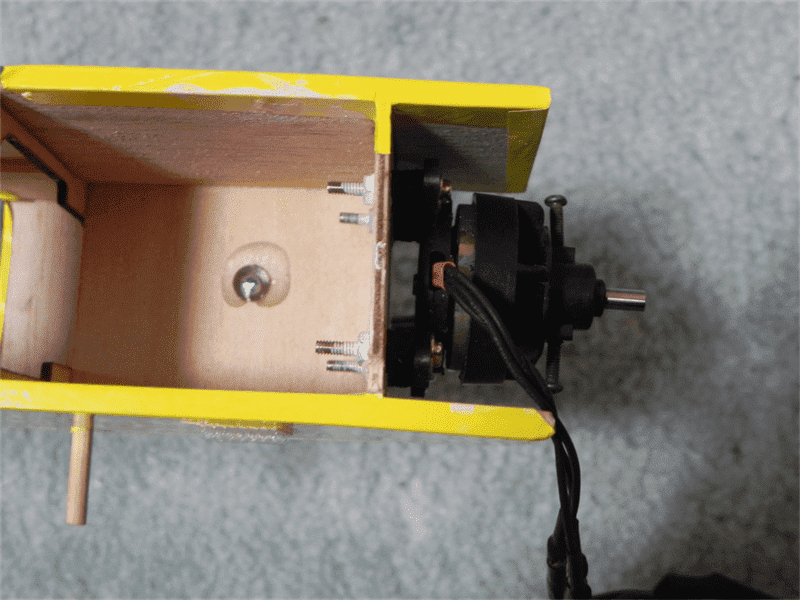
↑2×5㎜ヒノキ(長さ265㎜)と枠Cを接着し,三角補強材Gで補強します。 モーター取り付け板A,前輪取り付け板H,サーボ取り付け板Iを接着します。枠C,Dには切込みがあります。

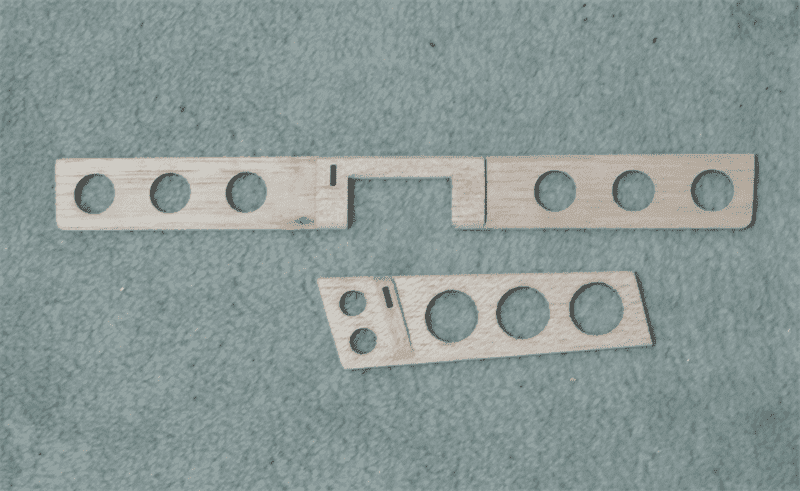
↑主翼取り付け部分補強材Jを取り付けます。2㎜シナベニアです。
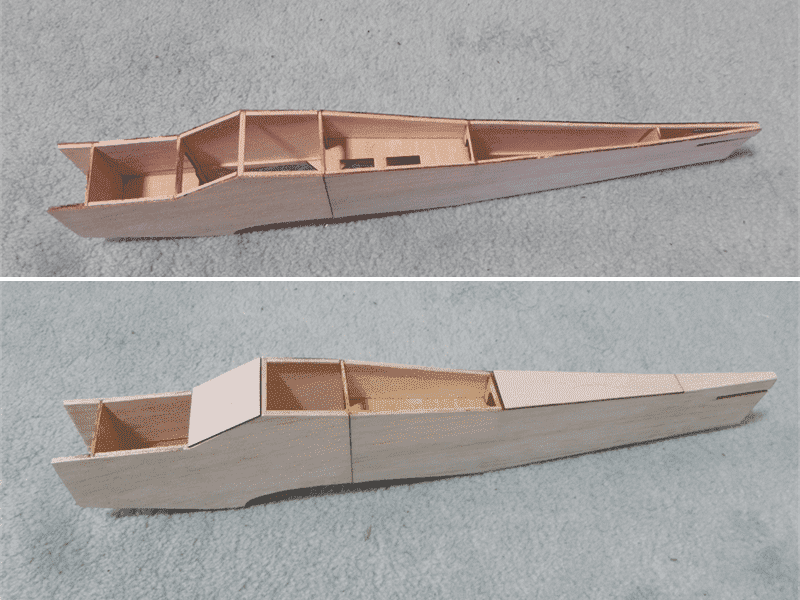
↑枠Eを取り付けます。側面を貼り付けます。 側面と上下板との連結部分に2×2バルサを接着します。(2㎜バルサ板をカットして作ります。) 上下面を貼った後角をまるめます。 キャノピー上部はサーボなどのメンテナンスのため空けておきます。

↑前面補強材を取り付けます。

↑下面の様子です。
↑拡大写真です。
↑後端に4×4ミリバルサを挟みます。
尾翼

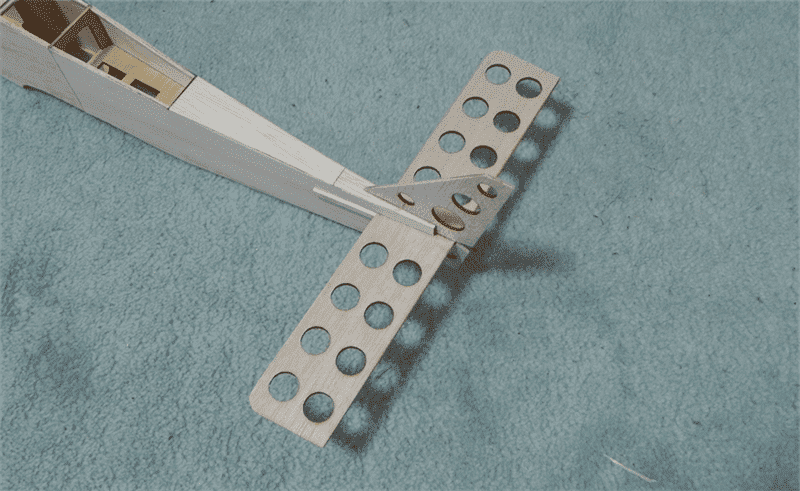
↑垂直尾翼と水平尾翼を取り付けます。1.5㎜厚バルサで作りますが,2㎜バルサで中抜き無しでもよいと思います。
↑水平尾翼の下面は2×8×80バルサで補強します。
↑ラダーとエレベーターのホーンの部分を補強します。
主翼
翼断面はRAF-34です。実機と同じです。 上反角は実機と同じ6.4°,8.1°,10°を実験した結果,メカが重い場合は10°以上必要です。 6.4°のとき翼端で35.7㎜(実機と同じ) 8.1°のとき翼端で44.7㎜ 10°のとき翼端で56.3㎜ になります。

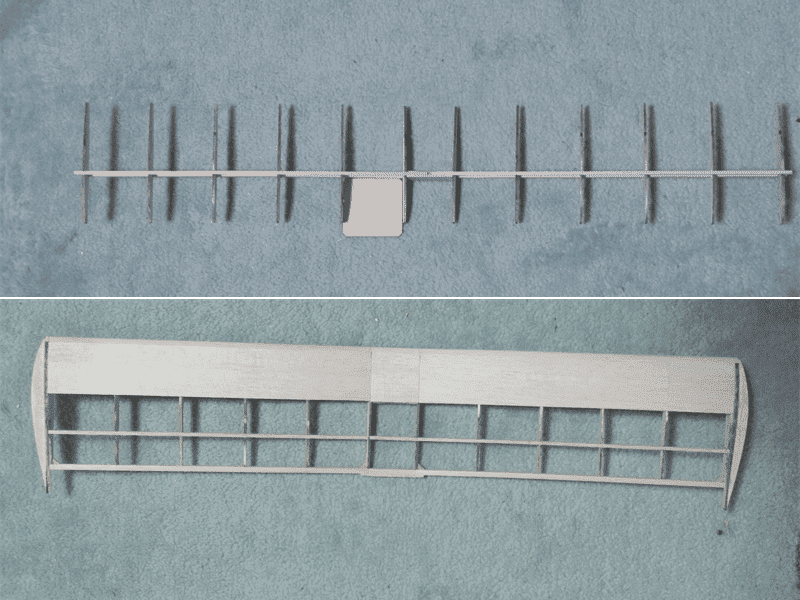
↑リブの配置図と上反角です。
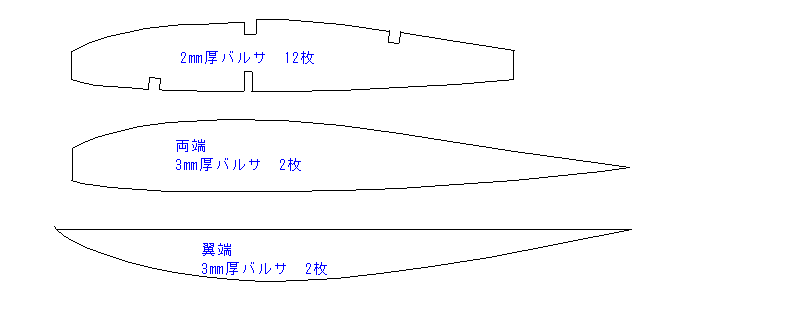
↑リブの形状です。リブの間隔は58㎜です。(芯芯寸法は60㎜)
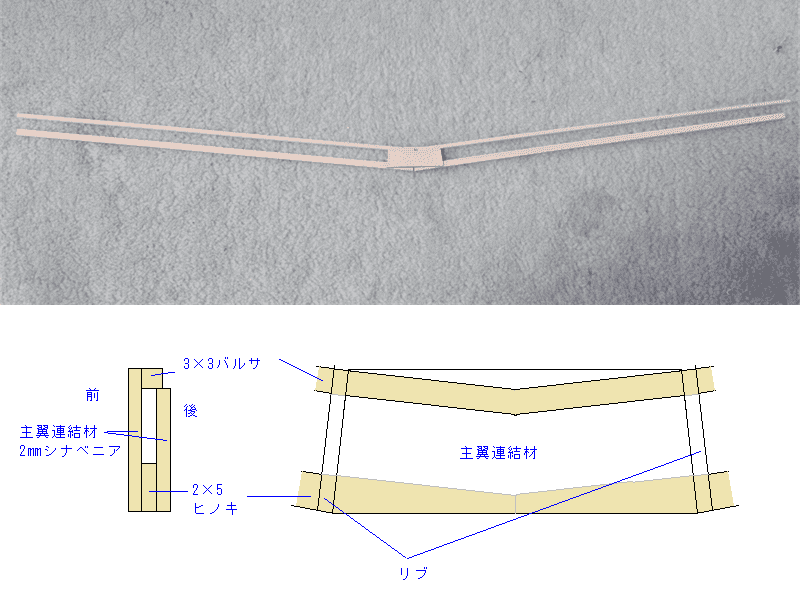
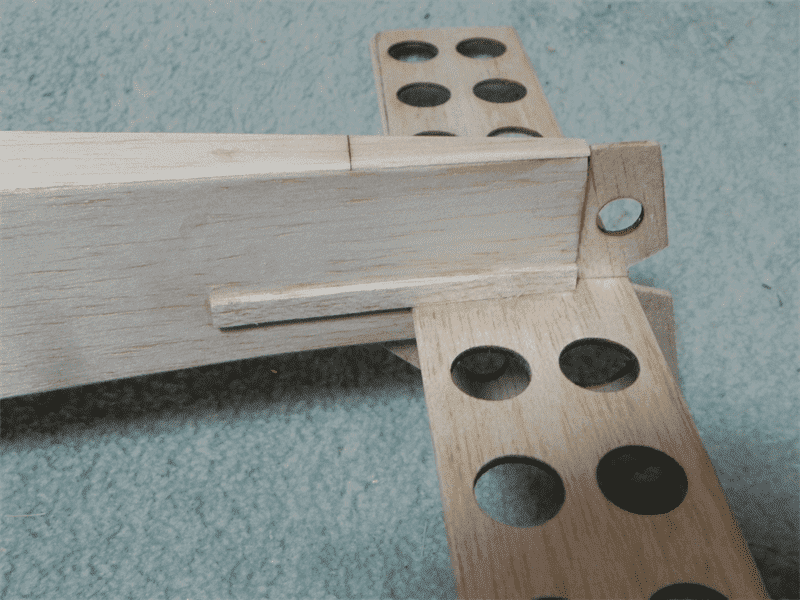
↑主翼連結材で2×5×329㎜(左右2本)ヒノキ棒を挟みます。上半角は翼端で水平からの高さ33.5㎜です。
↑リブの取り付けは58×58×1㎜の定規をバルサで作っておけば便利です。4隅を5㎜ほどカットしておけば接着剤が流れたとき被害が少なくて済みます。
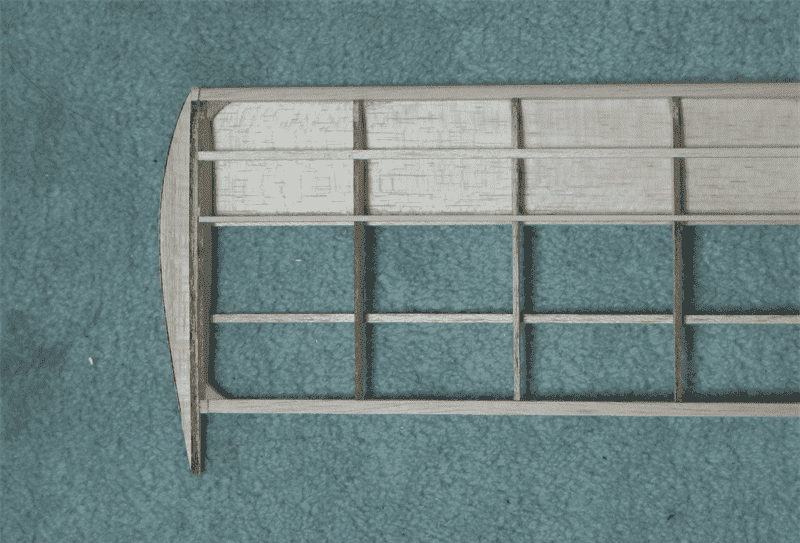
↑翼端です。三角バルサで補強します。
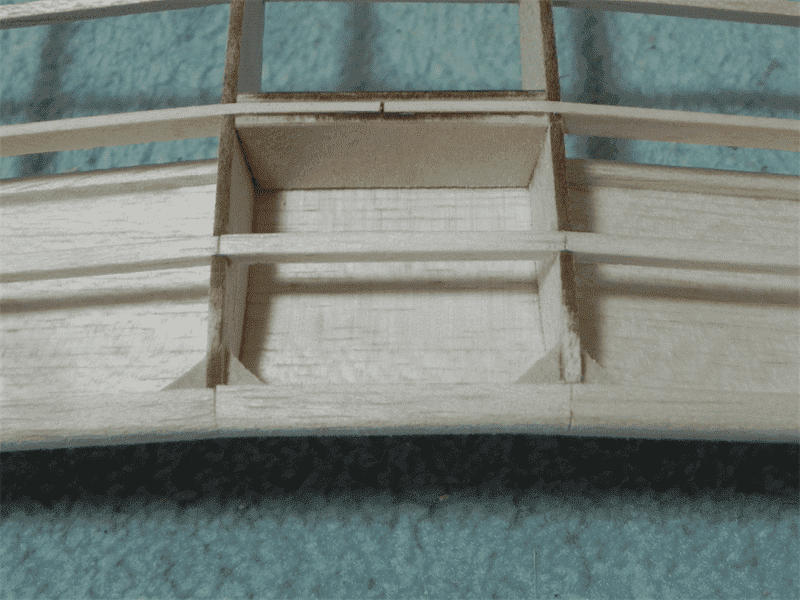
↑翼中心です。三角バルサで補強します。

↑サーボ取り付け板を取り付けます。2㎜厚シナベニアです。 後縁を補強します。
エルロン
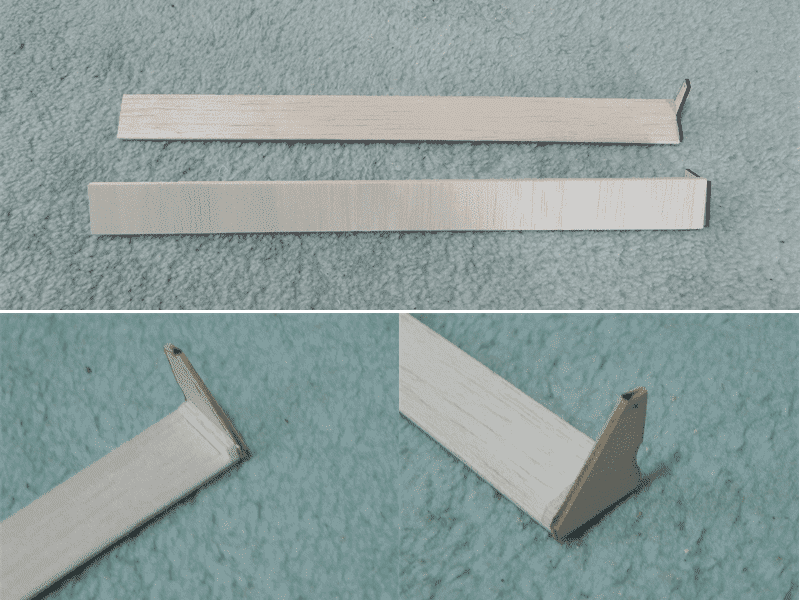
↑エルロンは1㎜バルサと2㎜バルサで作ります。
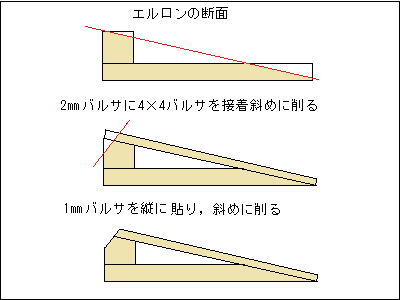
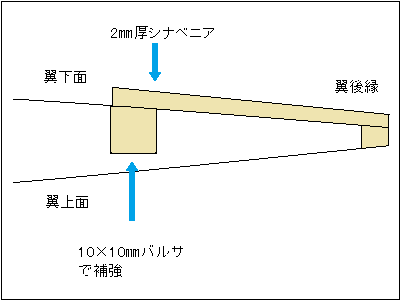
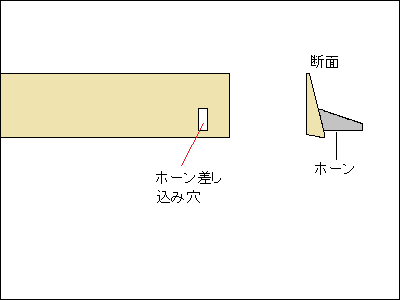
↑2㎜厚バルサに4×4バルサを貼り付け,ペーパーで斜めに削ります。その後1㎜バルサを木目がエルロンの長さ方向に直角になるように貼ります。 一方の端にホーンを取り付けます。2㎜厚シナベニアです。
↑●写真と異なりますが上図のやり方の方が良いと思います。写真の場合,着陸を失敗したときに胴体がホーンに当たりすぐに壊れます。
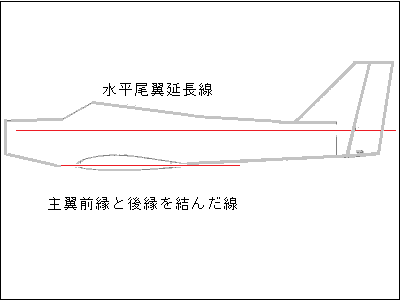
↑主翼の前縁と後縁を結ぶ線と尾翼が平行なとき取り付け角度0です。1~2°になるようにします。
● このサイズだとエルロンは10×20㎜角のバルサを削ったほうが楽かもしれません。白っぽい木目のはっきりしない柔らかいバルサを選べば作業は楽です。

↑10×20㎜角のバルサを斜めに2つに切り,削って作成しました。ホーンの位置も変更しました。ホーンは2㎜シナベニアです。
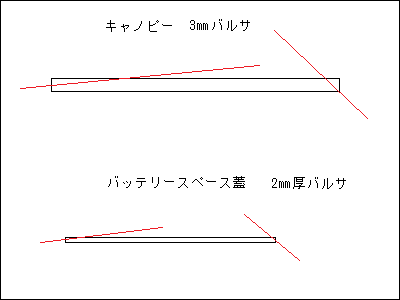
キャノピー・バッテリースペース キャノピーとバッテリースペースの蓋の取り付け状態は下図のようになります。

↑キャノピーとバッテリースペースの蓋は後側を厚さ1㎜になるまでペーパーで削ります。
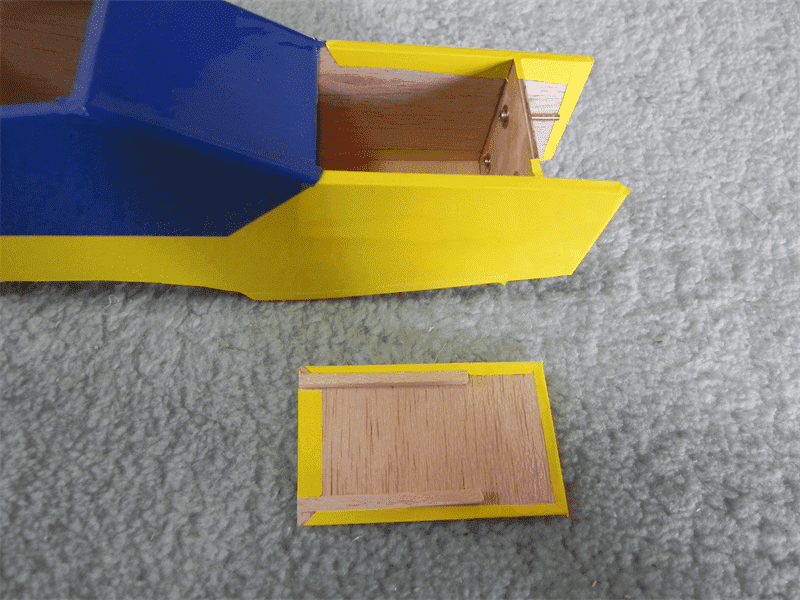
↑キャノピーは胴体に6×6㎜バルサを摂津着し,そこに木ネジで取り付けます。サーボや受信機のメンテナンス窓になります。

↑バッテリースペースの蓋の裏側には4×4バルサを取り付け,ずれないようにします。
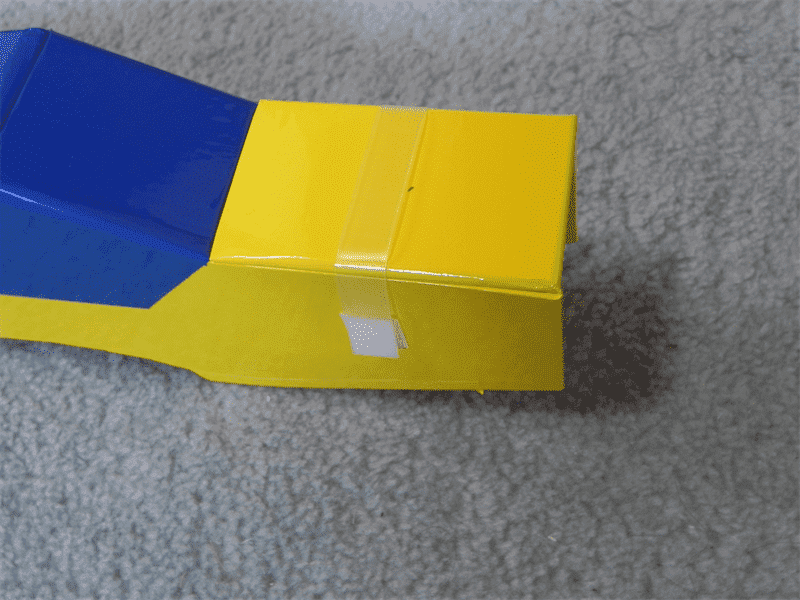
↑バッテリースペースの蓋はマジックテープと薄いシート(クリアファイル無地など)で留めます。
着陸脚
着陸脚は1.5㎜ピアノ線で作ります。普通サイズのペンチで十分曲げられます。
↑主脚(後輪)の取り付けです。1.0㎜アルミを使って2㎜木ネジで留めます。写真より前に(より重心の近くに)取り付けたほうが離陸し易いと思います。
↑主脚を重心の少し後ろに移動するために主翼底面に2㎜厚新ベニアを取り付けてここ取り付けるようにしました。滑走から離陸がスムーズになりました。
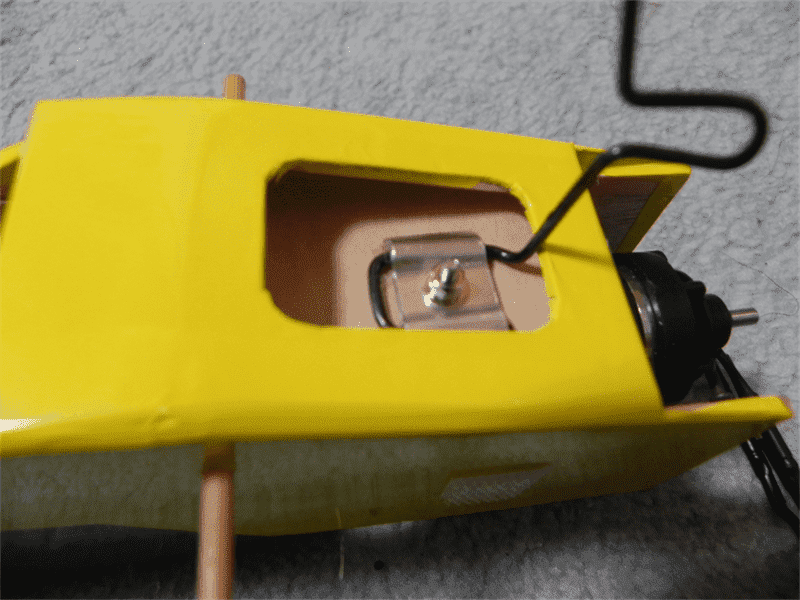
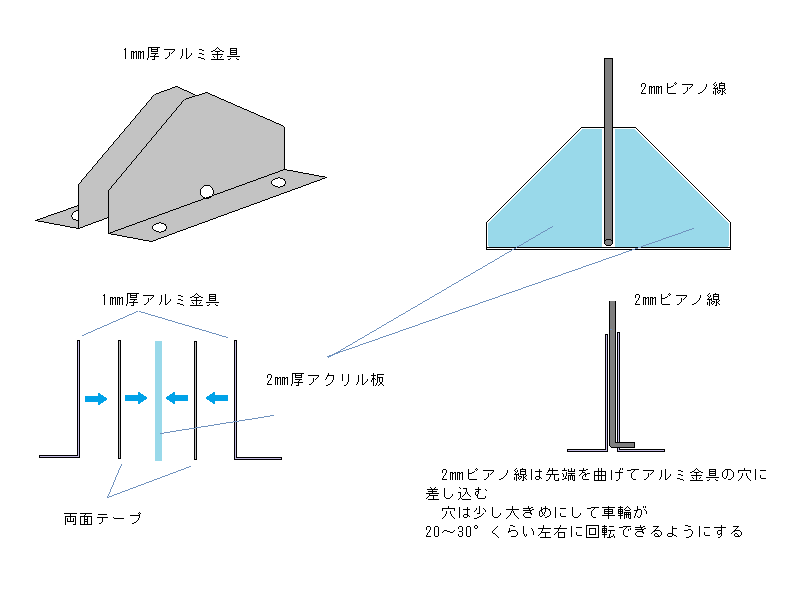
↑前輪も1.0㎜アルミを使って留めますが,2㎜ビスナットで留めます。
↑胴体内部は緩まないようにエポキシ樹脂で固めます。これにより外側からナットを回すだけで調整できます。
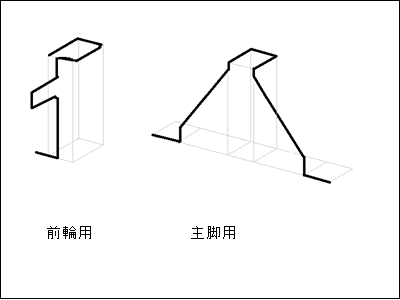
↑ピアノ線の曲げ方です。飛行場のラフの深さにより長さを決定します。 前輪のコの字はクッションです。1.5㎜ピアノ線の場合は直線でよいと思いますが,2㎜ピアノ線はコの字に曲げたほうが良いようです。前輪式の場合前輪が弱いと真っすぐ滑走しません。 主脚(後輪)は主翼にできるだけ近づけます。(できるだけ前にします)主脚の前の部分を軽くしないと離陸が難しくなります。
↑前輪の取り付けはこのような方法もあります。
車輪 アクリサンデーで自作するか超軽量ホイールを使います。 モーターやバッテリーの関係で強度が欲しい場合は超軽量ホイールを使います。 ホイルストッパーで止めたほうが無難です。 超軽量ホイールは共立エレショップから購入しました。なかなか取り扱っているショップがありません。共立エレショップのリンク先は「オンラインショップ」のページを参照してください。 塩ビ板やアクリサンデーで自作できます。「工作のテクニック」の「軽量ホイールの作成」を参照してください。

↑51mm 白

リンケージと配線
エルロンは0.8~1.0㎜ピアノ線,ラダーとエレベータは釣り糸でリンケージします。 サーボ
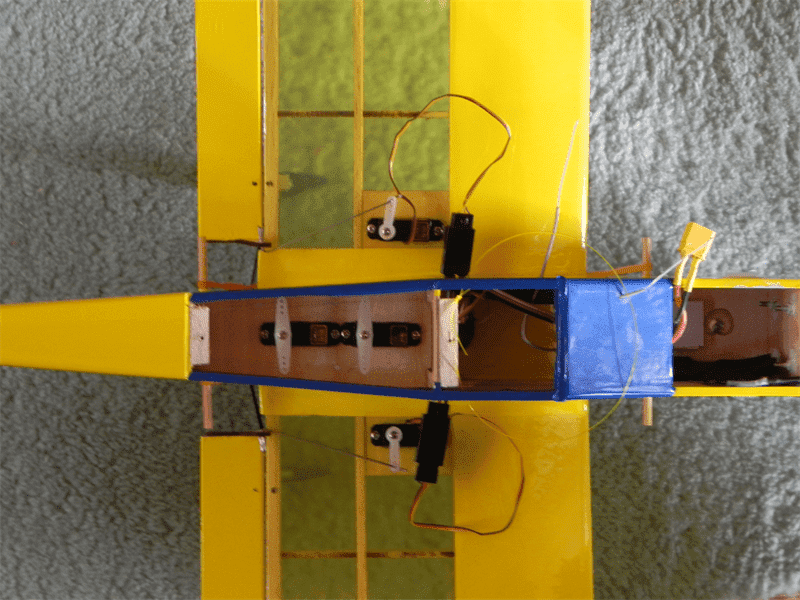
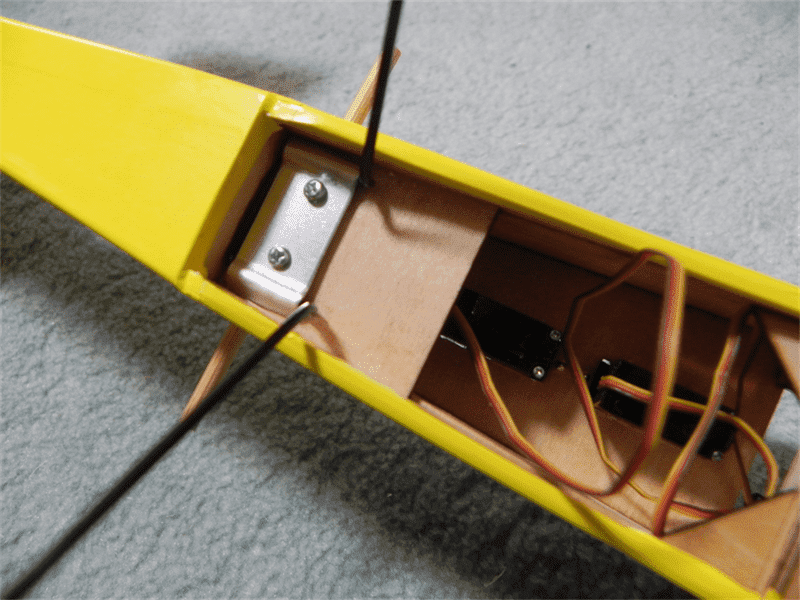
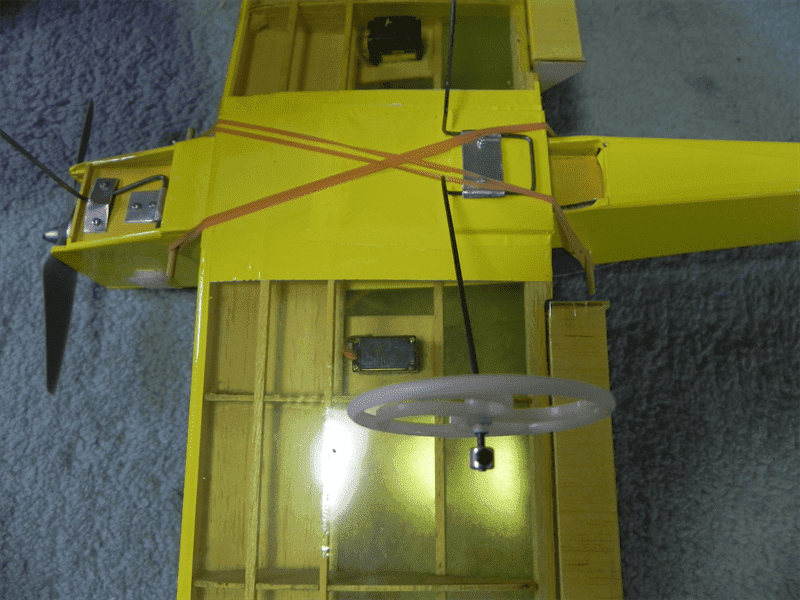
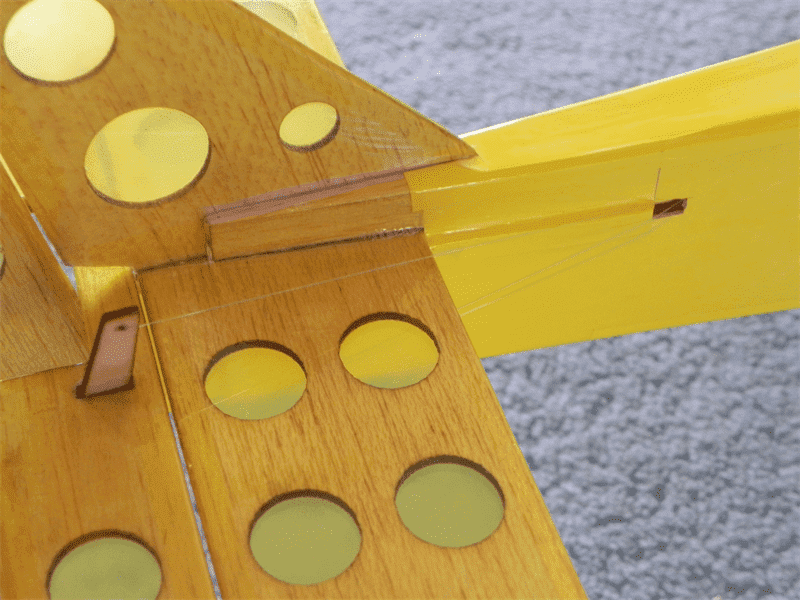
↑胴体内部がラダーとエレベーター用,翼についているのがエルロンサーボです。
エルロン エルロンは0.8㎜ピアノ線で「リンケージ」しています。
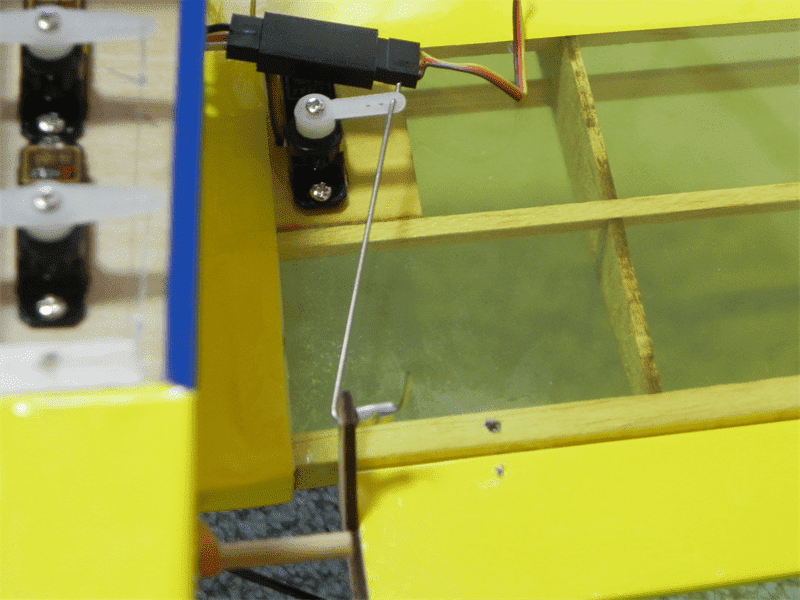
↑サーボ側はZ字型に曲げます。 ホーン側は3㎜アルミパイプを通して端を曲げます。

↑エルロンサーボのコードは余るのでY字ハーネスと接続後に胴体内部に押し込みます。

↑主翼と胴体は輪ゴムで留めますが,着陸脚の外側を通します。
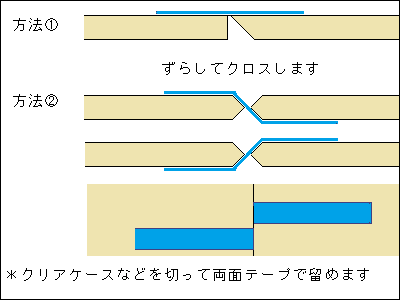
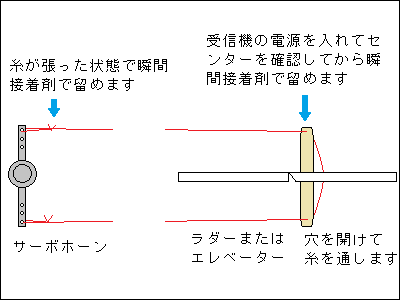
エレベータとラダーの取り付け エレベータとラダーはヒンジテープの他に,薄い塩ビシートを用いて下図の①または②の方法があります。
糸リンケージ エレベータとラダーは釣り糸でリンケージします。
↑釣り糸で「リンケージ」しています。
●リンケージの方法については「工作のテクニック」の「5 リンケージとストッパー」を参照してください。
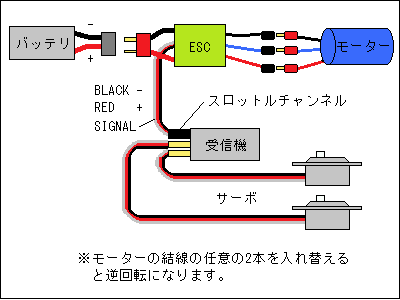
配線
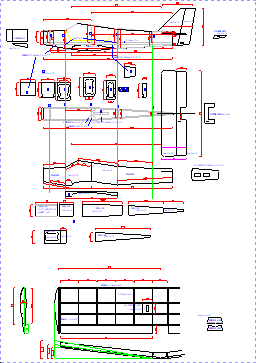
図面
pdfファイルA0サイズのpdfファイルです。画像をクリックして「プログラムで開く」でご覧になれます。 別ウインドウで開きます(再読み込みをしないと表示されない場合があります)。

参考資料 ▶「Target For Today」 ▶Robin HR-100/250 Tiara