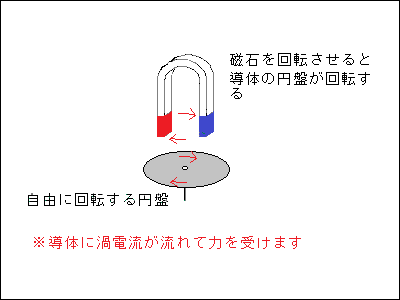
↑上図をアラゴーの円板と言います。
モーターの種類
誘導モーター 簡単に言うと回転する磁界のなかに導体を入れてやればそれが回転するという原理です。このような原理のモーターを誘導モーターと言います。交流や三相交流を利用して,回転する磁界を作っています。家庭用の誘導モーターは単相交流ですが,工場などでは三相交流を使います。交流なので自動的に電流の向きが変わり便利です。したがって回転数は交流の周期によって決まります。
↑上図をアラゴーの円板と言います。
ブラシモーター 直流電源を用いてコイルに電流を流して磁石の反発力で回るのがブラシモーターです。ブラシを利用して電流の向きを変え,コイルの磁極を切り替えて永久磁石との反発力で回転します。小学校の理科の時間に作った覚えがあると思います。このモーターは電圧を変えることで簡単に回転数を変化させられます。
ブラシレスモーター ブラシの代わりに電子回路(インバータ回路)で電流の向きを変えているのがブラシレスモーターです。電子回路で周波数を変えられます。
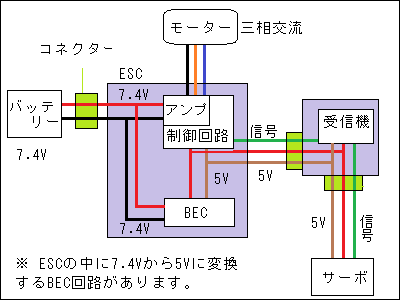
↑ESCの中の制御回路,受信機,サーボは全て5Vで動きます。機器を動かすには5Vの電源が必要です。 ESCにはモーター駆動用のバッテリを繋ぎます。ESCの内部には,これを利用した5Vを発生する電源回路を備えています。
ブラシレスモーターの種類 ブラシレスモーターには,コイルが外側で内側の磁石を回転(インナーロータ型)させるものと,コイルが内側で外側の磁石を回転(アウターローター型)させているものがあります。どちらも回転原理は同じです。アウターランナーモーターはアウターローターモータと言うのが一般的です。 ラジコン用のブラシレスモーターからは線が三本出ています。模型用のブラシレスモーターはすべて三相交流で駆動しています。
極数,スロット数
コイルの数をスロット数といい,三相の場合スロット数は3の倍数です。また,極数とは回転ロータの永久磁石の数を表し2の倍数個です。(NS一組です。)
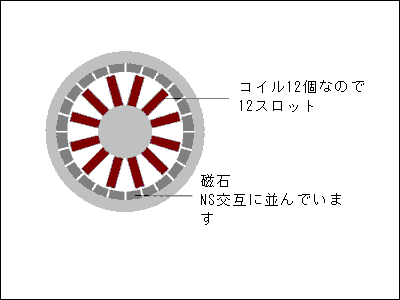

下図はスロット数12の場合の例です。同じ色は並列または直列につないであり,同時に電流が流れます。
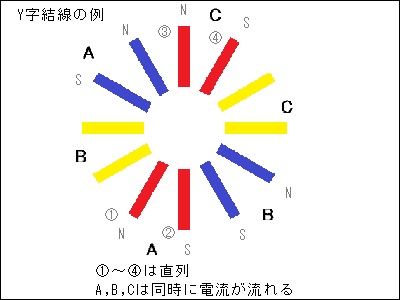
A→B→Cのように順番に流れます。これが電源の一周期で,これを何回も繰り返します。ラジコン用のブラシレスモーターは12スロット14極が多いようです。 コイルに順番に電流が流れるので回転磁界が生じますが,この磁界の回転数はスロット数だけでなくコイルの巻き方にも関係します。一般にスロット数が多くなると磁界の回転数は下がります。 ただし,スロット数が多くなるほど磁石を引き付ける場所が増えるので,大きなトルクが得られます。 スロット数や巻き方は変更できませんから,モーターの回転数を変えるには電源の周波数を変えます。 ●タマゾー ブラシレスモーターのキット ER-2208kit があります。自分でホルマン線を巻いて作ります。 ●コイルの巻き方の違いによりコイルの作る磁極数が異なります。(簡単に言えばいくつのスロットをひとまとめにするかということ) ●極数とスロット数の組み合わせは,4極3スロット,4極6スロット,16極12スロットなどいろいろな組み合わせがあります。
極数と回転速度
磁石の数を極数(ポール数)と言い2の倍数です。 極数と回転速度の関係について下図のように考えてみます。一列に並んだ磁石が右に動くとします。その上にはコイルが固定されていて,一定の周期でNとSが切り替わるとします。
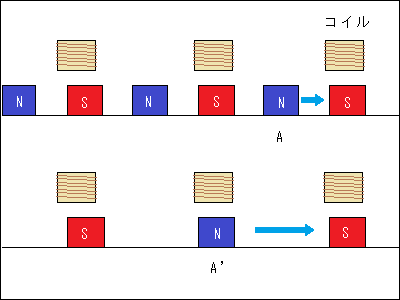
今①のコイルがN極だとすれば,上の図ではAの磁石を引き寄せ,下の図ではA'を引き寄せます。したがって下の速度が大きくなります。しかしコイルとの距離を考えると下の図では力が弱いことになります。つまり 極数が多い → 回転速度が低い。トルク(回転の力)が大きい。 極数が少ない → 回転速度が高い。トルク(回転の力)が小さい。 ということになります。また,コイルの電流の一周期(NS)で磁石が2個(NS)通過します。 例:「ASTRO POWER 20A ESCアンプ」のモーターの極数の違いによる対応可能な最大回転数(カタログデータ)
| 2極 | 210,000 | rpm |
| 6極 | 70,000 | rpm |
| 12極 | 35,000 | rpm |
この例からも極数が増えると回転数は比例して減っていきます。
回転数をN,電源の周波数をf,極数をPとすれば
![]() となります。
2倍してあるのは極数が2個(NS)でセットだからです。
となります。
2倍してあるのは極数が2個(NS)でセットだからです。
ターン数
ターン数はコイルの巻き数です。 コイルの巻き数が少ないと抵抗が少なく,同じ電圧でより大きな電流が流れるのでトルクが大きくなります。 モーターは回転磁界の速度(同期速度)で回転するとは限りません。さまざまな所に機械的抵抗や電気的抵抗があり,誘導起電力も発生し,それらが影響します。同期させるにはモーター側にセンサー,制御側(ESC)にもそれに対応した回路が必要です。 センサー付きモーターはそれに合ったESCが必要です。模型飛行機の場合,そこは省略して,スロットルに応じた電圧が加わるようになっています。
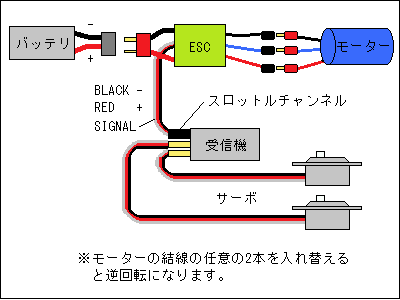
●飛行機用のブラシレスモーターの場合ほとんどセンサーはありません。モーターから出ている線も普通色分けしてありません。回転方向が逆の場合は3本の線のうち,任意の2本を入れ替えます。回転方向が変わります。 センサー付きの場合は線が色分けしてあります。正しく繋がないと正常に回転しません。回転方向が逆の場合はESCで設定します。 ●ドローン(マルチコプター用)のモーターで時計回りのCW(clock wise)と反時計回りのCCW(counter clock wise)がありますが,モーターのカン(筒)に直接プロペラ取り付け用のネジがあるタイプで,ネジが逆に切ってあるのがCCWです。センサー付きではありません。
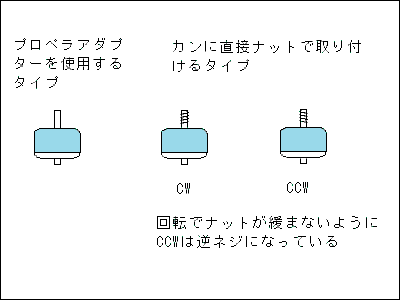
● 逆回転プロペラ(CCW)を使用する場合はサイドスラストの傾きは逆になります。 また,モーターのカン(筒)に直接プロペラ取り付け用のネジがあるタイプは逆ネジかどうかでプロペラ回転によりゆるむことがあるので注意が必要です。
ワット数と推力
手持ちのモーターでメーカー公表のデータを元にワット数と推力の関係を調べてみました。 gf/Wは1Wあたり何gfの推力になるかを示します。
CT2211-2200 2200Kv 16.8g O.S OMA-3810-1050 1050Kv 102g●gf/Wが大きいと効率が良く電流も当然少なくなっています。プロペラの選定次第では非常に効率が悪く,推力も減ることが分かります。 ●O.S OMA-3810-1050 で見ると11×10Eでは推力1,600gfで2.5gf/W(630W),10×5Eでは推力1,500gfで4.6gf/W(328W)となっています。推力はほとんど変わらず消費電力は半分になります。 ●モーターの消費電力(W)がそのまま出力(W)にはなりません。最大効率は良くて80%ほどと思います。
クラスについて
モーターを購入するとき,推力が書いてあれば良いのですが,様々な書き方がしてあり判断に困ることがあります。最も困るのは○○クラスのモーター,エンジン○○クラスという書き方です。いろいろなクラスについて参考になる事柄をまとめてみました。
モーターのクラス よくショップなど「400クラスのモーター」とありますが,これは以前マブチモーターのカン(筒)の長さでモーターの性能を表していたことによります。マブチモーターは180,260,280,380,540というクラス分けになっています。380のものを「400クラスのモーター」といいます。ブラシモーターでトルクが小さいのでギアダウンして使っていました。現在はブラシレスモーターが主流ですが,名前が残っています。 ニッカドバッテリーとギアダウンユニット,またモーター自体の重さ(RS-380PH-3270は80g)もあり,機体の重量に占める動力系の割合が大きくあっという間にリポバッテリーとブラシレスモーターになってしまいました。ブラシレスモーターは同程度の出力で40g程度です。 次の表はマブチの「400クラスのモーター」RS-380PH3270のデータです。(マブチのウェブサイトより)
| 電圧 | 無負荷 | ||
|---|---|---|---|
| 動作範囲 | 通常 | 回転数 | 電流 |
| 4.5~15.0V | 12V | 16,400r/min | 0.37A |
| 最高効率時 | 最大トルク | ||||||
|---|---|---|---|---|---|---|---|
| 回転数 | 電流 | トルク | OUTPUT | トルク | 電流 | ||
| 14,110 | 2.25 | 13 | 133 | 19.2 | 93.2 | 950 | 14 |
| r/min | A | mN・m | g・cm | W | mN・m | g・cm | A |
機体のクラス もともとモーターのクラスでしたが,「400クラスのモーターで飛ばす機体」と言う意味で使われるようになり,翼長およそ1m以下の機体をさすようになってきました。機体の重量も500g~1000g以上までかなり幅があるようです。
こちらはあるメーカーの電動ヘリのクラスと機体重量のデータです。
| クラス | 重量 | クラス | 重量 |
|---|---|---|---|
| 130 | 125g | 500 | 1800g |
| 200 | 325g | 550 | 3350g |
| 300 | 490g | 600 | 3650g |
| 450 | 730g |
エンジンのクラス モーターの表記にエンジン06クラスに相当と言う表記を見かけます。 エンジンのクラスは排気量を表します。単位は立方インチを100倍しています。25クラスは0.25inch3です。 ㎝3(cc)単位に変換するにはクラスの数字を100で割り,さらに1inchは2.54㎝なので2.543を掛けます。つまり0.164倍すればよいことになります。 次の表は小川精機の2ストロークエンジンについていくつかps(馬力)をW(ワット)に換算してみました。
| クラス | 排気量 | 重さ | 回転数 | 出力 | |
| 11 | 1.8cc | 161g | 17,000rpm | 0.28ps | 206w |
| 15 | 2.5cc | 138g | 17,000rpm | 0.41ps | 302w |
| 25 | 4.1cc | 197g | 15,000rpm | 0.60ps | 411w |
| 35 | 5.7cc | 280g | 16,000rpm | 1.30ps | 956w |
ワット(W)に直せば,モーターのワット数は電圧×電流で求められるので,ある程度の比較はできます。 ●モーターの消費電力(W)がそのまま出力(W)にはなりません。良くて80%程度だと思います。 ●馬力の単位は 1PS=735.5W(メートル法) と 1HP=745.7W(ヤードポンド法) の若干の違いがあります。
負荷と電流
負荷と電流について簡単な例で考えて見ます。 下図のように,間隔Lの平行導線上を導体棒が動くとします。
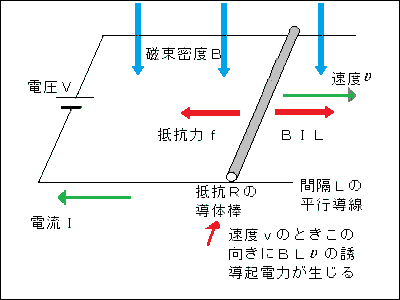
導体棒の速度がvのとき,導体棒には誘導起電力BLv が逆向きに生じ,キルヒホッフの法則により
![]() の電流が流れます。すると導体棒が磁界からうける力は
の電流が流れます。すると導体棒が磁界からうける力は
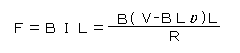 となるので
速度が小さいときはおおおきな電流が流れ,Fがfより大きく加速する。
速度vが大きくなるにつれて,電流が減少していく。
やがてFが抵抗力fに等しくなったところで電流と速度が一定(終端速度)となる。
となります。
抵抗力fが大きいと終端速度は小さくなります。このとき電流は大きくなります。
電流が大きくなる条件は,抵抗力fが大きい場合と,電圧が急に増加して速度の増加が追いつかない場合が考えられます。
大きいプロペラを付けすぎて抵抗力fが大き過ぎる場合は大きな電流が流れます。また,急激にスロットルを上げたときも大きな電流が流れます。このようなときは注意が必要です。
また,モーターの性能として1Vの電圧を加えたとき無負荷で何回転するかを表した数値をKV値と言います。KV1500とは1Vの電圧を加えたとき回転数が1,500rpmと言うことを示します。式から分かるように,2Vならば二倍の3,000rpmです。(rpmとは1分間に回転する回数。Revolutions Per Minute の略。round per minute 説もある)
発熱による抵抗の増加により実際は電圧を二倍にしても回転数は二倍になりません。
モーターに流せる電流の最大値はカタログに記載してありますが,記載がない場合は実際にバッテリー,受信機,ESC,プロペラを取り付けて(搭載した状態で)回転させます。必ずバッテリーの電流を測定して許容範囲にあることを確認します。フルパワーにせず少しずつ回転を上げながらモーターの温度の測定を繰り返します。(モーターのカンを手で触れて熱くなれればOK)
最終的にはフルスロットルまで繰り返します。ついでにESCも手で触れて異常な発熱がないか確認します。
となるので
速度が小さいときはおおおきな電流が流れ,Fがfより大きく加速する。
速度vが大きくなるにつれて,電流が減少していく。
やがてFが抵抗力fに等しくなったところで電流と速度が一定(終端速度)となる。
となります。
抵抗力fが大きいと終端速度は小さくなります。このとき電流は大きくなります。
電流が大きくなる条件は,抵抗力fが大きい場合と,電圧が急に増加して速度の増加が追いつかない場合が考えられます。
大きいプロペラを付けすぎて抵抗力fが大き過ぎる場合は大きな電流が流れます。また,急激にスロットルを上げたときも大きな電流が流れます。このようなときは注意が必要です。
また,モーターの性能として1Vの電圧を加えたとき無負荷で何回転するかを表した数値をKV値と言います。KV1500とは1Vの電圧を加えたとき回転数が1,500rpmと言うことを示します。式から分かるように,2Vならば二倍の3,000rpmです。(rpmとは1分間に回転する回数。Revolutions Per Minute の略。round per minute 説もある)
発熱による抵抗の増加により実際は電圧を二倍にしても回転数は二倍になりません。
モーターに流せる電流の最大値はカタログに記載してありますが,記載がない場合は実際にバッテリー,受信機,ESC,プロペラを取り付けて(搭載した状態で)回転させます。必ずバッテリーの電流を測定して許容範囲にあることを確認します。フルパワーにせず少しずつ回転を上げながらモーターの温度の測定を繰り返します。(モーターのカンを手で触れて熱くなれればOK)
最終的にはフルスロットルまで繰り返します。ついでにESCも手で触れて異常な発熱がないか確認します。
参考文献等 ▶日本電産 ▶タマゾー ER-2208kit 組み立て説明書 ▶indexPro(日本最大の電子産業部品ポータルサイト)