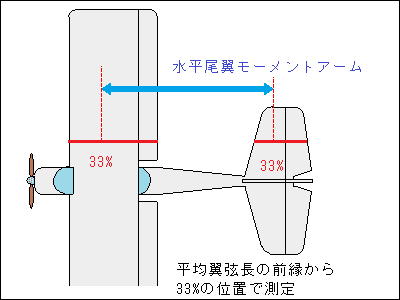
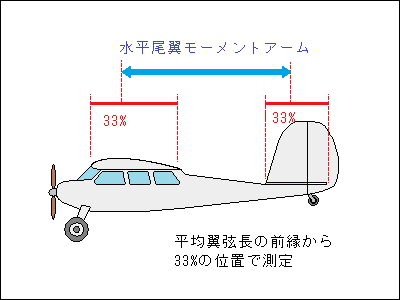
 モーメントアームは主翼,尾翼の前から1/3の距離を測ります。
モーメントアームは主翼,尾翼の前から1/3の距離を測ります。
尾翼容積比
尾翼容積比の範囲 実機と同じ縮尺では小さな機体は飛びません。はじめに翼面積を変更して,翼面荷重が50以下(できれば40以下)になるように主翼面積を決め,垂直水平尾翼容積比を範囲内に収めれば十分だと考えます。その後,平尾翼容積比と直尾翼容積比を計算し範囲内に収まるようにします。 水平尾翼容積比は0.30~0.60,垂直尾翼容積比は0.02~0.05の範囲がおおよその目安です。
水平尾翼容積比 容積比の単位は㎝,g単位を使います。 主翼について次の量を測定します。
| C | 主翼平均翼弦 | 主翼の幅(平均値) |
| W | 主翼翼長 | 主翼の長さ(平均値) |
水平尾翼について次の量を測定します
| Sh | 水平尾翼面積 | 水平尾翼平均翼弦×水平尾翼翼長 |
| 水平尾翼平均翼弦 = 水平尾翼の幅(平均値) 水平尾翼翼長 = 水平尾翼翼の長さ(胴体部分含む) | ||
| Lh | モーメントアーム | 主翼前縁から水平尾翼前縁までの距離。(これで十分です) |
容積比の計算 容積比=(水平尾翼面積×モーメントアーム)/(主翼平均翼弦×主翼面積)
| 容積比=(Sh×Lh)/(C×S) =(Sh×Lh)/(C2×W)-------① |
水平尾翼容禎比を大きくすれば、外乱に対して復元力が大きくなり、安定性が強くなります。しかし安定性が強すぎると操縦できないことになるので適当な値にする必要があります。 水平尾翼容禎比を大きくするにはモーメントアームを長くするか尾翼面積を大きくします。
水平尾翼動ファクター比 元の状態に戻す時間的を考えると,動ファクター比が大きいと短時間に元に戻ります。 (水平尾翼面積×モーメントアーム2)/(主翼面積×主翼平均翼弦2)
| (Sh×Lh2)/(S×C2) |
元の状態に戻す時間的を考えると,動ファクター比が大きいと短時間に元に戻ります。 モーメントアームを長くすると短時間でもとにもどります。 ラジコン機の場合 1.3 ~ 2.2 と思われます。
垂直尾翼翼容積比 主翼について次の量を測定します。単位は㎝,g単位を使います。
| C | 主翼平均翼弦 | 主翼の幅(平均値) |
| W | 主翼翼長 | 主翼の幅(平均値) |
| S | 主翼面積 | 主翼平均翼弦×主翼翼長 |
垂直尾翼について次の量を測定します。
| SV | 垂直尾翼面積 = 垂直尾翼平均翼弦×垂直尾翼高さ |
| LV | モーメントアームアーム |
容積比の計算 容積比=(垂直尾翼面積×モーメントアーム)/(主翼翼長×主翼面積)
| 容積比=(SV×LV)/(W×S) =(SV×LV)/(C×W2)--①よりS = C×W |
●模型飛行機の場合0.03~0.06程度ですが大きいとダイブします。 ラダー機は大きめにした方が舵が効きます。
モーメントアームは主翼,尾翼の前から1/3の距離を測ります。
●容積比は両方とも分子は面積×モーメントアームですが,分母は2乗の位置が異なっています。
翼長を変更したら 主翼の翼長Wだけを増やしたとき,モーメントアームを増やして安定性を保つにはW2の項のある垂直尾翼のモーメントアームの方を水平尾翼のモーメントアームより大きくする必要があります。これはラジコングライターでも良く見かけます。
●垂直尾翼面積を増やしても安定します。
翼弦長を変更したら 主翼の翼弦長Cだけ増やした場合は逆にC2の項のある水平尾翼のモーメントアームの方を垂直尾翼のモーメントアームより大きくする必要があります。
●水平尾翼面積を増やしても安定します。
テスト飛行
滑走テスト 出来上がってすぐに飛ばすのは無茶です。垂直容積比と水平尾翼容積比が範囲内あっても安定するとは限りません。 容積比の計算では出てこない,上反角と垂直尾翼面積の関係を実際に飛ばしてから検討することになります。 ① 推力を確認します。ハーフスロットル程度で滑走するかどうか見ます。 ② 真っすぐ滑走するか確認します。真っすぐ滑走しないときはサイドスラスト,ラダー面積を確認します。 ラダー面積を極端に変更すると安定性が失われます。 ● 翼面荷重の大きい機体は離陸速度に達するまでの時間が長くその間プロペラ後流の影響をラダーで補正できない場合があります。特に無風状態のとき起こりやすい現象です。ラダーを大きくしすぎても上反角との兼ね合いでバランスが崩れてしまいます。 上空で安定しているならばラダーはいじらずに,尾輪式ならば尾輪はラダーにとりつける,前輪式ならばサーボを追加して前輪をラダーと連動させるなどの対策が必要です。
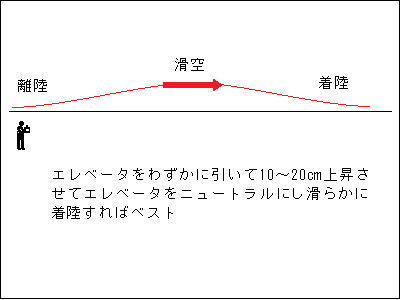
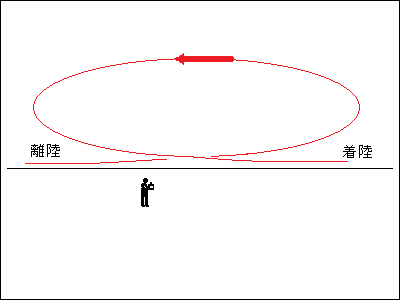
軽く浮かしてみる うまく滑走したら50㎝ほど浮かして水平飛行してすぐに降ろします。このとき重心とエレベータを調整します。 軽く上げて(1m程度)左右に旋回して着陸します。エルロンの効果を検討しエンドポイント(トラベルアジャスタ)を調整します。エンドポイントは飛行中にスイッチで切り替えられるので,複数設定していたほうが良いでしょう。 風のないときにしかテストできないので,ここまで調整しながら1カ月ほどかかることもあります。
高い高度でテスト ここまで来たら今度は上空まで上げてテストします。20~30m程の高度で旋回テストして完了です。
その後,パワーが大きいときの頭上げなどの様子をみてスラストラインや主翼の取り付け角度を調整します。
●スケール機の場合,高翼機は実機と同じ程度の上反角で安定します。 ただし,底翼機の場合は実機より大きくしないと安定しません。 また,底翼機の場合,バッテリーなど重いものに変えたときは主翼上面の質量が増えるのでより大きな上反角が必要です。およそ10°ほど必要と考えます。
ダッチロールとスパイラルダイブ
ダッチロールとスパイラルダイブ 容積比が範囲内にあっても,他にも安定性を損なう原因がいくつかあります。まずは離陸直後または手投げ直後の挙動を観測し,何が起こっているか判断します。
特にダッチロールとスパイラルダイブについては,頭上げとともに原因追及が難しく飛行を安定させるために苦労する現象です。ダッチロール(ヨー方向とロール方向の振動)とスパイラルダイブ(螺旋不安定)とは対極にあり,上反角の大きさと,垂直尾翼容積比の相対関係が不適当であるときにいずれかに陥ります。普通に飛んでいるのに,特に低速のとき,急に不安定になることも良く経験します。 上反角の大きさを変更するのは最後の手段として,まず垂直尾面積で調整します。上反角は実機と同じにしておきます。このとき垂直尾翼容積比も変わります。 容積比は一応の目安であり,上反角と垂直尾翼の関係は求められません。ただし,高翼機などは重心が下にあり,もともと自立安定性があるので上反角は必要無いこともあります。前進翼や後退翼もそれぞれ特徴があります。
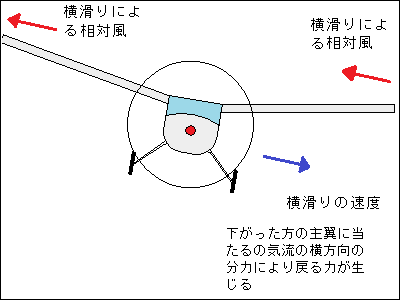
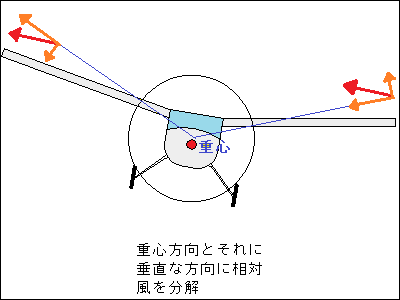
外乱と上反角の働き 上反角と垂直尾翼は互いに逆の働きをします。どちらかの効果が大きすぎると不安定になります。 上反角は外乱により機体がロール方向に傾いたとき,横滑りをすることでモーメントを発生させ,元に戻そうとする働きをします。 下図のように右に(正面から見て)傾くと右に滑りながら飛びます。すると主翼の右に強く気流があたり戻そうとします。 このとき,垂直尾翼には斜め右から気流があたり,逆に傾きを助長する向きに力が働きます。
●低翌機はラジコンの場合は実機より大きくした方が安定します。実機と同じだとスパイラルダイブ気味にることがよくあります。
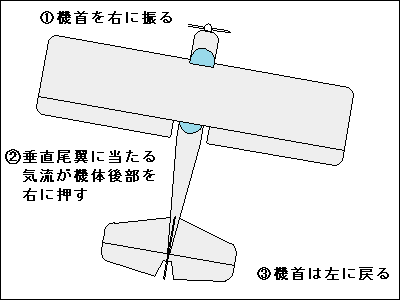
外乱と垂直尾翼の働き 垂直尾翼は外乱により機体がヨー方向に傾いたとき,尾翼に斜めから風が当たることでモーメントを発生し,元に戻そうとする働きをします。 このとき左側の主翼の気流が右側より速くなるので左側を上げて右に旋回しようとします。 外乱に対して主翼と垂直尾翼は逆の働きをします。
静安定と動安定 外乱に対して,元に戻ろうとする力が働くとき「正の安定性」,状態を持続するとき「中立の安定性」,変化を助長するとき「負の安定性」と言います。
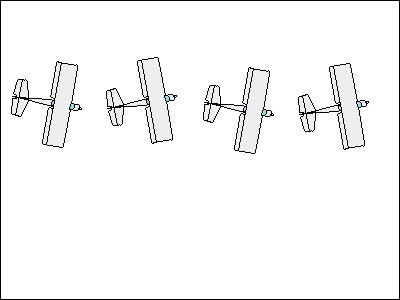
「正の静安定」のとき,振幅が徐々に小さくなっていくとき「動的に安定」,振幅を持続するとき「動的に中立」,振幅が大きくなっていくとき「動的に負の安定」と言います。
ダッチロール ダッチロールは「上反角による復元力」>「垂直尾翼による復元力」で,ロール方向に戻り過ぎてしまう現象。この振動は収束すれば問題ないのですが,発散するようならば墜落に至ります。 ダッチロールが起こっているときは → 上反角を小さくするか,垂直尾翼容積比を大きくする。
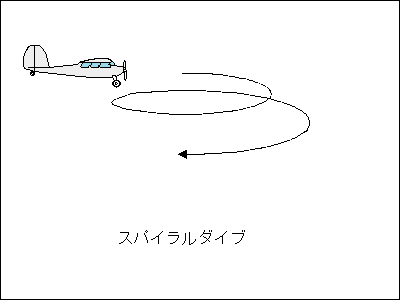
スパイラルダイブ スパイラルダイブは「上反角による復元力」<「垂直尾翼による復元力」で,ロール方向に戻らないまま螺旋運動で降下します。 スパイラルダイブが生じているとき → 上反角を大きくするか,垂直尾翼容積比を小さくする。 上反角が普通であって不安定ならばスパイラルダイブではないでしょうか。
ダイブとスピン 外乱に対して速度が大きいときは無視できても,速度が遅いと少しの外乱でも大きな影響を受けます。 特に着陸前の旋回は速度が遅くなりがちなので注意が必要です。 旋回半径が小すぎると,円の内側の翼は速度が小さくなりすぎ失速することがあります。大きく失速すると揚力不足で急激に機体が傾き,スピンに陥り,回復するのが困難になります。 同じ大きさの機体でも翼面荷重が大きいと,より大きな揚力を必要とするので早めにスピンに陥ります。 スパイラルダイブは両翼とも失速しているわけではないのでスピンと違い回復可能です。

その他検討すべきこと
上反角 高翼機は重心が主翼より下にあり,機体の傾きに対して戻ろうとするモーメントが働きますからあまり上反角はついていません。低翼機や中翼機は上反角が必要です。 実機では見かけませんがエルロンのないいわゆるラダー機は機体を傾けて旋回するので垂直尾翼が大きくなります。そのため大きな上反角が必要になります。
| 角度 | ラジアン | 水平100㎜に 対する高さ | 水平500㎜に 対する高さ |
| 0 | 0.0000 | 0.0 | 0.0 |
| 1 | 0.0175 | 1.7 | 8.7 |
| 2 | 0.0349 | 3.5 | 17.5 |
| 3 | 0.0524 | 5.2 | 26.2 |
| 4 | 0.0698 | 7.0 | 34.9 |
| 5 | 0.0873 | 8.7 | 43.6 |
| 6 | 0.1047 | 10.5 | 52.4 |
| 7 | 0.1222 | 12.2 | 61.1 |
| 8 | 0.1396 | 14.0 | 69.8 |
| 9 | 0.1571 | 15.7 | 78.5 |
| 10 | 0.1745 | 17.5 | 87.3 |
| 11 | 0.1920 | 19.2 | 96.0 |
| 12 | 0.2094 | 20.9 | 104.7 |
| 13 | 0.2269 | 22.7 | 113.4 |
| 14 | 0.2443 | 24.4 | 122.2 |
| 15 | 0.2618 | 26.2 | 130.9 |
上反角の測定は分度器では誤差が大きすぎます。tanの表を作っておけば便利です。例えば5度の場合,横200㎜に対して高さは17.49㎜です。(上表)
パワーとの関係 パワーは機体重量程度が良いのですが予想通りのパワーが出ないときや出過ぎることもあります。 モーターとプロペラの選定は,カタログで確認してからセットで入手した方が無難です。ショップのカタログにはたいてい使用プロペラと推力が書いてあります。 パワーが大きすぎるとき,低速でパワーをかけ過ぎればコントロールが効かないことがあります。また推力不足だと離陸直後頭上げで失速することもあります。 また,推力とスラストライン(推力線)の関係も安定性に及ぼす影響は大です。「重心と主翼の位置・推力線」のページを参照してください。
剛性を検討する飛び方が挙動不審(予想外のことが起こる)のときはまず剛性不足を検討してみます。 主翼の剛性不足はエルロンが翼の捩じれで逆方向に効くことがあります。また,フィルムが弱いとフラッターを起こすこともあります。 胴体の捩じれは急にエレベーターが効いたり,ラダーが効いたりします。 リンケージの「がたつき」がないか,モーターの取り付けにゆるみがないかなども重要なポイントです。 このような現象は特に高速のときにおこります。低速では良く飛ぶのにパワーをかけると挙動不審になるのは剛性不足と思われます。
ジャイロの活用長い時間かけてせっかく作った機体を壊さないように3軸ジャイロを使うことをお勧めします。3軸ジャイロについては「ラジコン飛行機の機器」の「飛行機用ジャイロ」のページをご覧ください。

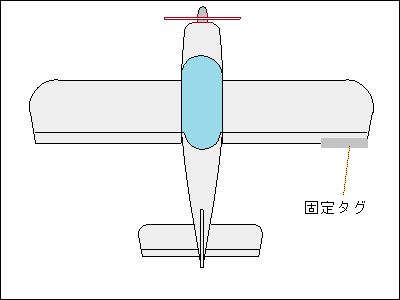
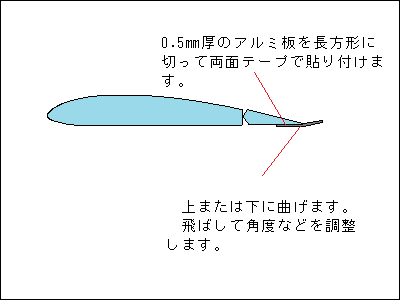
固定タブによる捻じれ補正 タブとは飛行機のエルロン,ラダー,エレベータの後縁(後部)に取付けられた小面積の翼で固定式と可動式があります。機体のねじれ等から発生する飛行のくせを修正するためのものです。 シャーレー構造の主翼は補修などで捻じれた場合はなかなか修正できません。場合によってはトリムで調整できないこともあります。そのような場合0.5㎜厚アルミ板を加工してエルロンに取り付けると解決します。
 航空自衛隊T-7初等練習機
航空自衛隊T-7初等練習機 ボーイング707の尾翼
ボーイング707の尾翼慣性モーメント 上反角と垂直尾翼面積のバランスに関する計算式はありません。従って実際には飛行状態を見て判断する以外にないのですが,安定性にはもう一つ大切な要因があります。 それは,「回転軸の周りにどのように質量が分布しているか」で,これを「慣性モーメント」と呼びます。回転軸近くに質量がある場合と離れたところに質量がある場合とでは前者の方が回転に必要な力は小さくて済みます。前者を「慣性モーメントが小さい」後者を「慣性モーメントが大きい」と言います。
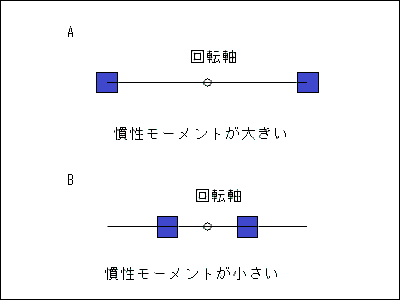
慣性モーメントが大きいと外乱で揺れ始めると止まりにくく,不安定で操縦しにくくなります。 そのため質量はできるだけ回転軸の近くに集中させた方が良いと思います。例えばエルロンサーボは胴体の近くに持ってくるなどの工夫が必要です。 特に小型の底翼機はエルロンサーボを重いものに取り換えただけで不安定になることがあります。回避するには上反角と垂直尾翼面積を増やします。
フラッター 主翼フラッターは主翼ねじれ剛性が不足の場合にエルロンの空力振動が主翼振動と共振することで生じます。 SZD-45A Ogarで主翼がフラッターを起こしました。 主翼ねじれ振動に対しては次の方法でねじれ剛性を高めるか,作り直すことが必要です。 ⑴ エポキシ樹脂をラッカーシンナーで薄めて塗布する。 ⑵ タイトボンドを水で薄めて塗布する。 エルロンによる振動の場合は次のようにします。 ⑴ 最初にリンケージのガタツキが無いようにする。 ⑵ エルロンにバランスおもりを付けてエルロン重心をエルロンヒンジ上におく。 ⑶ エルロン側からはサーボが動かないようなものを選択する 他にもプロペラバランス,ジャイロ効果,トルクの反作用なども考えられます。
オーバーラン
所属するフライトクラブの滑走路は70mほどありますが,接地点を滑走路の端に持ってくるのはなかなか難しく,オーバーランすることがあります。(空母に着陸するような感じです。![]() )
実機ではどのようなことを行っているのか動画を見てみました。
)
実機ではどのようなことを行っているのか動画を見てみました。
F-22ラプターの着陸ですが,かなりの間機首を上げたままで抵抗を受け速度を落としています。ジェット戦闘機はそうしないと止まれないそうです。滑走中にエレベーターを操作しているのが分かります。
YouTube
旅客機もしばらく機首を上げたままです。機首を上げている時間はまちまちですが結構長いのもあります。 セスナのような軽量飛行機は前輪式の場合,3輪とも同時に接地しています。 実機と模型は異なりますが参考になると思います。 尾輪式の機体は尾輪が設置すると風に対して迎え角が付き自然とブレーキが掛かりますが,前輪式の方がオーバーランしやすいと思います。
プロペラ後流の影響 回転するプロペラ後流の影響 プロペラ後流は後から見ると(操縦席から見ると)右回りに回転しています。(右回転プロペラの場合) 高出力では気流が増えて,水直尾翼(ラダー)の働きが強くなると同時に右へ押す力が働きます。特に,低速で高出力の時(離陸時など)にこの作用は強くなります。従って機体は操縦席から見れば左に向きをかえようとします。 電動ラジコン飛行機は推力0から機体重量以上まで大きく変化します。垂直尾翼だけでなく水平尾翼もプロペラ後流の影響を結構受けているようです。低速(スロットルオフ)でラダーが効かない,低速(スロットルオフ)でエレベーターが効かないなどの影響があります。 同じ推力でプロペラ後流を減らすには大きいプロペラで流速を落としてやる方が良いはずですが,プロペラを大きくした途端に操縦が難しくなった経験が何回かあります。
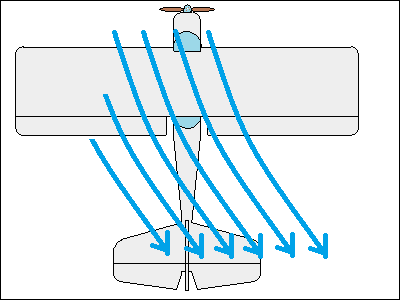
プロペラ後流のラダーへの影響を減らすため,あらかじめ推力線を傾けて取り付けてプロペラ後流の影響を減らすようにします。これをサイドスラストといいます。サイドスラストは背面では逆効果です。 進路が右方向に曲がる → サイドスラストが大きすぎる。 進路が左方向に曲がる → サイドスラストが小さすぎる。 ● プロペラ後流は主翼にも影響します。上図下の図の通り機体を右に傾けます。速度の小さい離陸直後にパワーをかけすぎると右旋回してコントロールを失います。また,水平尾翼を持ち上げる働きもします。 このような現象を回避するためには離陸直後パワーを絞ることが必要です。特にパワーの大きい機体は注意が必要です。 ● 逆回転プロペラ(CCW)を使用する場合はサイドスラストの傾きは逆になります。プロペラをCWからCCWに変えるときはモーターの結線を変えるだけではなくスラストの傾きも変える必要があります。 また,モーターのカン(筒)に直接プロペラ取り付け用のネジがあるタイプは逆ネジかどうかでプロペラ回転によりゆるむことがあるので注意が必要です。
推力線と水平尾翼の位置 ⑴ 推力線より上に水平尾翼がある場合プロペラ後流が尾翼を持ち上げるので → スロットルハイで機首下げ,ローで機首上げ ⑵ 推力線より下に水平尾翼がある場合プロペラ後流が尾翼を下向きに押すので → スロットルハイで機首上げ,ローで機首下げ
P-ファクター 飛行機の機首が上を向いたとき,風が機体の下からプロペラに当たるようになり,右側のブレードの推力が大きく,左側のブレードの推力が小さくなり左に曲がろうとします。 低速で高出力の時にこの作用はより強くなります。 またプロペラ後流の強い右側では主翼の右側の揚力も大きくなります。
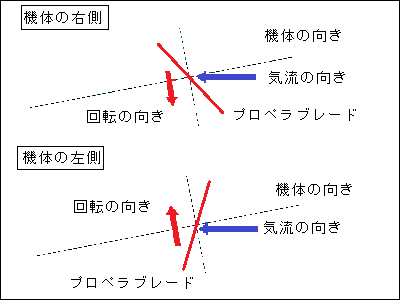
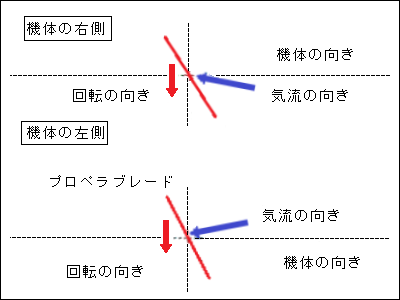
右側のプロペラは気流に対して大きな角度になるので右の推力が大きくなるのですが,もしかして失速角(10~12°)を越えて推力が逆に落ちてしまうことがあるのではないかと考えます。 その時は逆に機体は右に曲がります。離陸直後にパワーをかけ過ぎて右にダイブしたことが何回かありました。
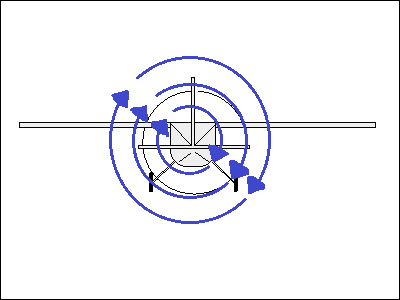
プロペラの反動トルク 物体に与える回転のモーメントをトルクと言います。回転体の抵抗が無ければ回転数が一定のとき,必要なトルクは0ですが,プロペラは空気抵抗が大きいので常にトルクを加え続けます。その反作用として機体にはプロペラと反対向きのトルクが生じます。(反作用) 特に回転数を急激に変化させるときは大きなトルクが発生します。

参考文献等 ▶模型航空機の安定