Pitching -- 左右を軸にした回転(縦揺れ) Rolling -- 前後を軸にした回転(横揺れ) Yawing -- 上下を軸とした回転(偏揺れ)
基本事項
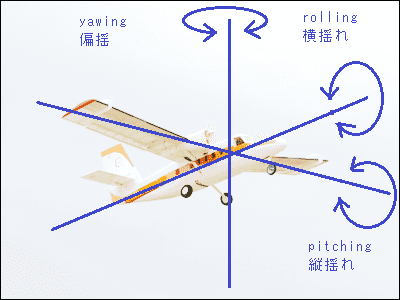
揺れの種類
Pitching -- 左右を軸にした回転(縦揺れ) Rolling -- 前後を軸にした回転(横揺れ) Yawing -- 上下を軸とした回転(偏揺れ)
トリム 「トリムを取る」とはすべての送信機スティックが中立のとき,飛行状態を維持するように調節することです。速度やパワーのON OFFにより飛行状態が異なるので厄介です。滑空状態で調節する方が良いと思います。 エレベーターに関して,水平飛行を続けるためにエレベーターを少し上向きに調節してある状態を「アップトリム」,逆を「ダウントリム」と言います。
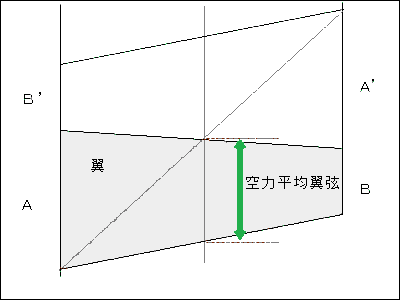
空力平均翼弦 仮想上の翼弦に揚力がすべて作用すると仮想すれば,翼の特性を考えるときに便利です。この仮想上の翼弦を空力平均翼弦と言いテーパー翼の場合は下図のように作図します。(AA'とBB'は同じ長さ。) Mean Aerodynamic Chord(平均空力コード 直訳)の頭文字を取って「MAC」と略すことがあります。
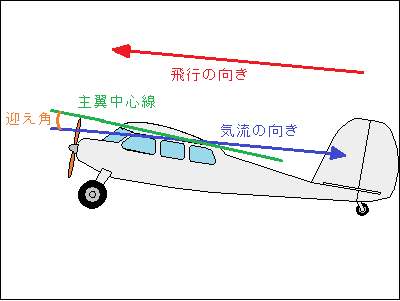
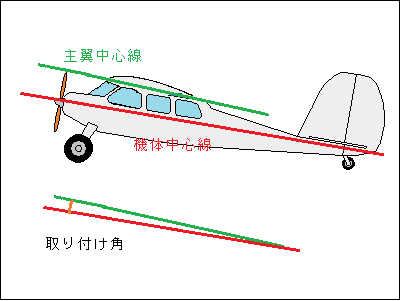
迎え角と取付け角 「迎え角」は翼の断面の基準線 (翼弦線) と飛行機の進行方向となす角。飛行状態により変化します。迎え角が大きくなるに従い揚力は増しますが,抗力は増えます。迎え角が大きくなりすぎると失速します。 「取付け角」は翼が胴体基準線となす角。飛行状態により変化しません。
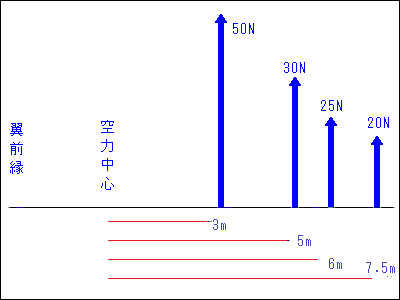
風圧中心 翼の各部分には場所や迎え角によって異なった大きさの力が働きます。これらの細かく分けた力をすべて加えたらどうなるかを考えてみます。簡単な例でいうと平行な二つの力を加えると大きさは簡単な足し算ですが,もう一つ大切なことはその合力の働く場所です。加える前の力と加えた後の力(合力)の回転の働きも同じでなくてはいけません。したがって,合力の周りの「回転の働き」は0です。この「回転の働き」をモーメントと呼びます。モーメントは力×回転軸までの距離で定義されます。 「翼型と揚力」のページの「ベルヌーイの定理の簡単な説明」を参照してください。
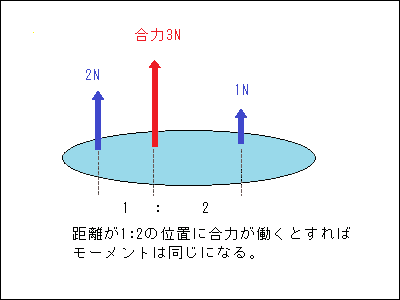
上の図を上下逆にして1Nと2Nが重力ならば3Nの力の働く場所は重心です。 翼に働く力の揚力の合力はモーメント0の点に働くと考えればいいわけです。 揚力の合力が翼弦線と交わる作用点を「風圧中心」と言います。翼の迎え角と速度によりその大きさや向きが変化します。 迎え角が小さいとき「風圧中心」は後方に,迎え角が大きいとき「風圧中心」は前方に移動します。 パワーをかけると徐々に迎え角が大きくなり,「風圧中心」は前方に移動し飛行機全体から見ると頭上げモーメントが生じます。
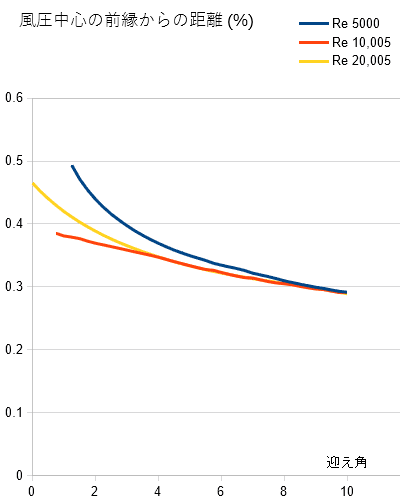
↑迎え角が大きくなると風圧中心は前に移動します。 ( Airfoil Tools のデータより)
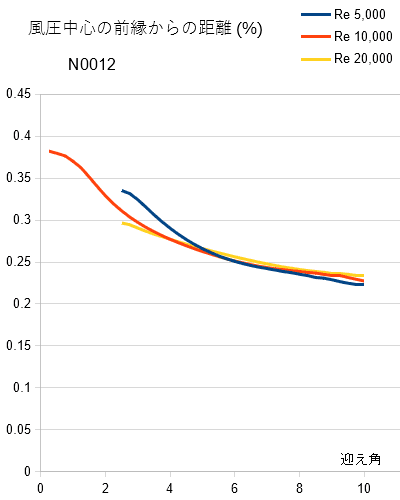
↑( Airfoil Tools のデータより)
風圧中心の周りのモーメントは0と良く言いますが,翼に働く力の合力はモーメントが0の位置に書くのが当然であって,因果関係が逆のような気がします……
空力中心 翼に働く揚力の合力の向きと作用点(風圧中心)は迎え角とともに変化します。迎え角が大きくなるほど力の作用点(風圧中心)は前縁に近づいてきます。 作用点が移動むすると計算上厄介ですが,翼の一点に着目するとその点の周りには,回転のモーメントが生じます。翼の前縁から25%の点についてモーメントを測定すると迎え角に関係なくモーメントの大きさはほぼ一定となります。おもしろい点ですね。
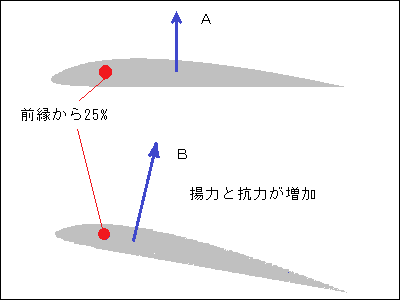
上図でBはAより力が大きいのですが,25%の点からの距離が短くなりモーメントは同じになります。 この点を「空力中心」と言います。「風圧中心」と違って移動しないので計算に便利です。主翼,尾翼とも空力平均翼弦の前縁から25%の点です。「空力中心」は迎え角によらず揚力のモーメントが変化しない点です。
もう少し具体的に見ていくと,上の図で空力中心から見るとすべての力のモーメントは同じ大きさです。もし空力中心に力が働けばそのモーメントは0です。 前縁から見ると4つの力のモーメントは等しくありません。また,空力中心に力が働いてもそのモーメントは0ではありません。
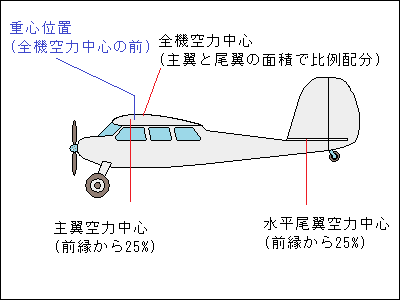
全機空力中心主翼,尾翼の空力中心距離を,面積で比例配分した点を「全機空力中心(安定中立点)」と言い,主翼の空力中心より後です。 「全機空力中心」と「重心(質量中心)」の関係が最も重要です。
重心位置と主翼の位置
重心と全機空力中心 回転軸の無い物体は力を加えると重心の周りに回転します。重心位置はバッテリーの位置やおもりをつけることで変えられます。また,主翼の位置を変えると当然重心の位置は変わります。 「重心位置を決める」の意味は,「全機空力中心(安定中立点)」と「重心」の位置関係をどうするかということです。 重心位置は,全機空力中心(安定中立点)から翼弦長の10%以上前に来るようにします。これは重心の周りに回転モーメントを生じます。向きは頭下げにしますが,そうでないと飛行が不安定で操縦しにくくなります。 「重心位置」は「主翼の空力中心」の前ではなく「全機空力中心」の前です。
「全機空力中心」は主翼と水平尾翼の面積比と距離によって異なります。したがって全機空力中心の「10%以上前」に重心が来るようにするといったあいまいなことになります。
重心と平均翼弦の位置関係 全機空力中心を計算し,その10%以上前とするよりも,主翼の空力平均翼弦の前縁から33%の方が一般的で便利です。特に「全機空力中心」を意識する必要は無いと思います。 このサイトで紹介してある「練習用ラダー機」と「練習用軽量セスナ」について全機空力中心を計算し,前縁から33%の位置との差を求めてみました。
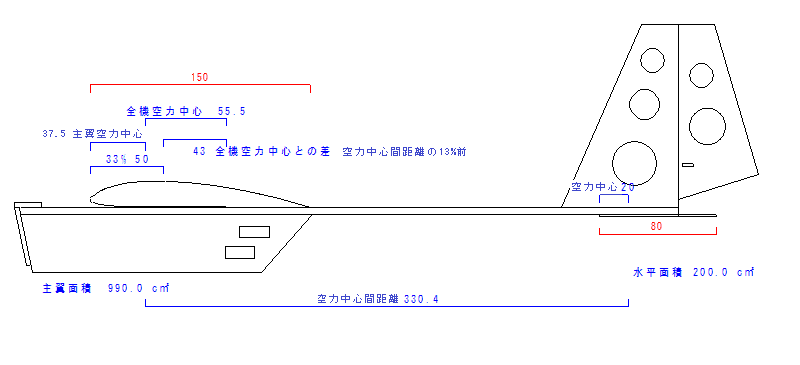

前縁から33%の位置は練習用ラダー機のでは全機空力中心より空力中心間距離の13%前に,練習用セスナでは17.2%前になりました。 主翼面積や水平尾翼面積を変えると全機空力中心は移動します。 例えば翼長を伸ばすなどして前縁から33%の位置を変えずに主翼面積を増やすと全機空力中心は前に移動します。33%の位置と全機空力中心の関係は変わります。 面倒な計算はやめて主翼の前縁から33%の位置と重心の位置関係で考えればよいと思います。 全機空力中心の10%以上前 ⇒ 主翼の空力平均翼弦の前縁から33%
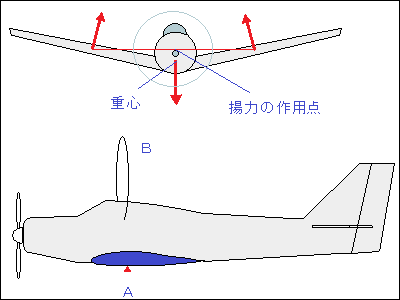
底翼機などは主翼の位置を変更するのは難しいので,バッテリーの位置などずらして重心位置をずらします。 また,底翼機は揚力の作用点が重心位置より上にあれば安定性のある機体になります。そのためには上反角を大きくし,重心位置をできるだけ下にします。 底翼機の重心位置ですがA の位置を支えると回転するので,上下さかさまにして支えるか, B のように釣り糸などで輪を作って機体にとおしておけば簡単です。
重心位置は「主翼の空力平均翼弦の前縁から33%」ですが,「風圧中心」が機種,翼型によって異なるので.飛ばしやすい「主翼の位置」と「重心位置」の関係は機種,翼型,翼の上下の取り付け位置によって異なります。 実機の場合,主翼の空力平均翼弦の前縁から25~33%。ラジコンの場合、安定性重視なら20%,運動性重視なら30%前後の位置に「重心」が来るのが一般的という説もありますが,まずはきちんと「主翼の空力平均翼弦の前縁から33%」の位置に重心が来るように調整し,その後実際の飛行状態を見て飛ばしやすい主翼と重心位置の関係を求めます。
主翼の取り付け角と位置の調整
主翼の取り付け角の調整 主翼の前縁先端部と後縁先端部を結んだ線を基準とします。この線は必ずしも翼の下面と平行とは限りません。例えば,クラークYは下面(後70%は直線)を機体の基準線に水平に取り付けると取り付け角が約2.2度です。また,下面フラットのクラークZは約1.6度です。 角度を付けると水平飛行時の揚力が上がりますが,空気抵抗は大きくなります。また取り付け角を付けると風圧中心が前方に来るので水平飛行時に「機首下げ」しないことになり,速度を上げると逆に「機首上げ」します。 基本的に,水平飛行時に水平尾翼と進行方向が平行になるように迎え角をつけます。ただし,翼型によっては迎え角0で揚力が発生するものもあります。面倒な計算より主翼の前縁から1/3で飛ばしてみて決めるが正解のようです。
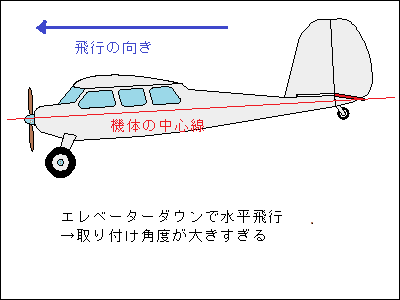
↑対象翼のスポーツ機の場合は取り付け角度0でこのような飛行になります。
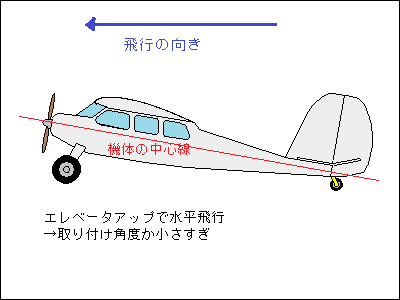
グライダーなど手投げで沈降率が確認できる場合,取り付け角度が大きいと沈降率が小さいことはすぐに分かります。 取り付け角が大きくなると速度変化に対する姿勢変化が大きくなるのでパワーアップすると簡単に頭上げを起こします。推力があって速度域の広いラジコン機では取り付け角は非常に小さいのが普通です。 重心が平均翼弦の前縁から33%であることが前提(後述重心の項参照)で,滑空状態から取り付け角度が妥当か確認します。エレベーターアップで滑空する場合は取り付け角度不足。エレベーターダウンで滑空する場合は取り付け角度過多です。
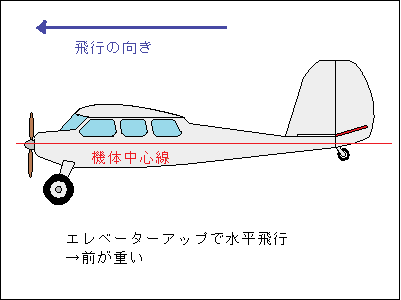
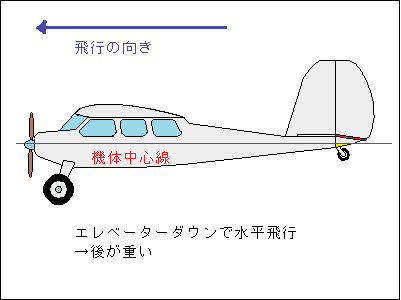
主翼と重心位置の調整 「重心が前」あるいは「前重心」と良く言いますが,正しくは「主翼の空力平均翼弦の前縁から33%の位置より前に重心がある」と言う意味で33%の位置で支えると前が下がります。以下「重心が前」「重心が後」と言う言い方をします。 重心が前のとき ⑴ アップトリムで水平飛行しているので,速度が大きいと機首上げ,小さいと機首下げ。 ⑵ 安定性が高い。 ⑶ 低速と高速の挙動変化が大きく,低速で頭下げになる。 ⑷ 着陸時に引き起こし不足になりがち。 重心が後のとき ⑴ ダウントリムで水平飛行しているので,速度が大きいと機首下げ,小さいと機首上げ。 ⑵ 操縦が敏感。低速から高速まで,小さい舵角で姿勢変化が得られる。 ⑶ 静安定性が小さく飛行困難。
主翼の取り付け角と重心 風圧中心とは、空気力が実際に作用している点のことで,迎え角が変わると移動します。迎え角が大きくなると風圧中心は前に移動します。 主翼の取り付け角の大きい機体は初めから迎え角が大きく,水平飛行時の風圧中心は前で,重心位置は通常より前にします。
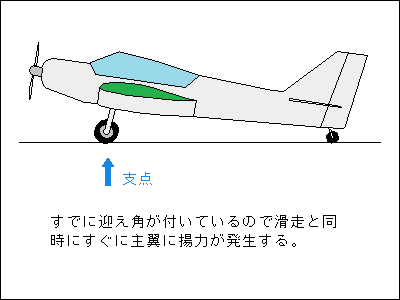
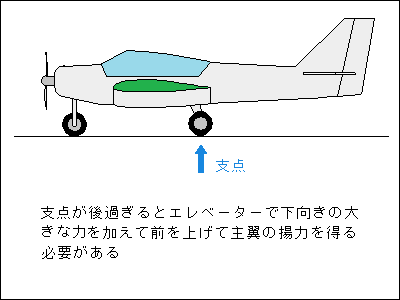
主脚と重心位置 前輪式と尾輪式では滑走状態に違いがあります。 尾輪式の場合は滑走を始めたとき主翼には迎え角がついています。したがってすぐに揚力が発生します。軽い機体ならエレベーターを引かなくても浮き上がります。 これに対し前輪式の場合は迎え角がついていません。迎え角をつけるためにはエレベーターを引く必要がありますが,このとき主脚の位置が重心位置より後過ぎると迎え角を付けるために大きな力が必要になります。主脚の位置は重心の少し後であればよいと思います。 主脚の位置が重心位置より後過ぎる場合エレベーターを大きくしなければ離陸できず,離陸した途端に今度はエレベーターが効きすぎて迎え角が付きすぎることになってしまいます。
推力線の調整
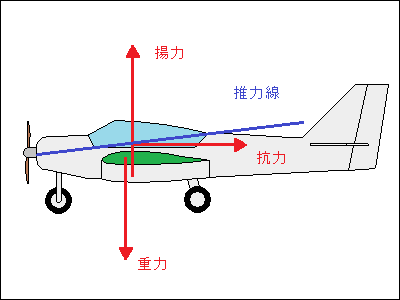
推力線 推力線(スラストライン)はどこを通るのがベストでかと考えたとき,推力の変化によるピッチング方向の回転モーメントが生じない点となります。 機体を水平にして重心位置を決めますが,これは「この点を通る鉛直線上に重心がある」ということです。次に,機体を鉛直に下げたときの鉛直線と先ほどの線との交点が正しい重心です。ここに重力が働くと考えます。 全体の抗力(主に主翼と胴体)の作用点は主翼の大きさ形状,胴体の大きさ形状(流線形かどうかなど)により異なってきます。これは実際には測定できません。高翼機か低翼機かによっても大きくことなります。 飛行機に働く力は「揚力」「重力」「抗力」「推力」の4つと考えるとこれらのベクトルの作用線が一点に交わるとき回転モーメント0となります。 「揚力」「重力」の作用線はほぼ一致していますから,簡単に考えると「重心」と「抗力」の作用線の交点を推力線が通るようにすると言えます。 上反角がついていると翼の抗力は取り付け位置ではなくてそれよりも上になります。練習用ラダー機は胴体の抵抗が小さくて上反角が大きいので,大きなダウンスラストがついています。
多くの場合高翼機は推力線が大きく下向きになります。また,スケール機でも主翼を大きめに作りますから抗力は実機よりもより主翼により近づきます。実機と同じ角度の推力線では安定しません。 4つの力の作用線が一致するのが理想ですが,迎え角が大きくなると揚力の作用点は前方に移動し頭上げモーメントは大きくなります。模型飛行機は実機より重力にたいする推力が大きいのでこの傾向は顕著です。 ●実際は重力の作用線は揚力の作用線より少し前にしないと安定しません。また,水平尾翼による回転モーメントも影響します。 「抗力」の作用点を求めることもできません。実際に飛ばしてどの向きの回転モーメントが生じるか見るほかは無いと思います。
推力線と主翼の位置
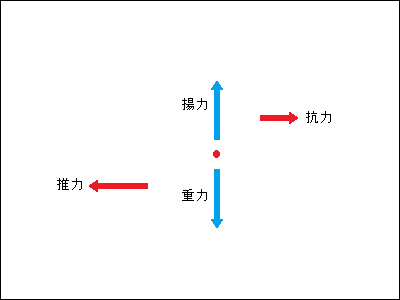
↑推力と抗力ともに右回りのモーメント(頭上げ)です。 重力 = 揚力
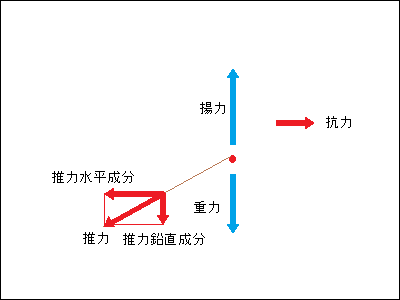
↑回転のモーメントは0です。 重力+推理の鉛直成分 = 揚力 抗力の作用点が上に移動 → 左回りのモーメント(頭下げ) 抗力の作用点が下に移動 → 右回りのモーメント(頭上げ)
推力線の調整はおよそ次のような感じになると考えます。 ⑴ 推力線よりも上の抵抗が大きい。(低翼機など) ①スロットルハイで機首上げ,ローで機首下げ → スラトラインの傾きは前を下げる。 ②スロットルハイで機首下げ,ローで機首上げ → 推力線の傾きは前を上げる。
⑵ 推力線よりも下の抵抗が大きい。(高翼機など) ① スロットルハイで機首下げ,ローで機首上げ → 推力線の傾きは前を上げる ② スロットルハイで機首上げ,ローで機首下げ → 推力線の傾きは前を下げる
推進式(プッシャー式)の機体の推力線 推進式とはプッシャー式とも言いますがプロペラが主翼の後ろや上にある形式です。一般的な飛行機は牽引式といいます。 推進式の場合は高翼(肩翼)で主翼と同じ高さに推力線がくるようにした方が良いというのが分かったのは,エンジン出力が増えたもう少し後の時代です。 Anderson-Greenwood-14(1947)以降の SZD-45A Ogar(1973),InterPlane Skyboy(1992)などはそのように作られています。
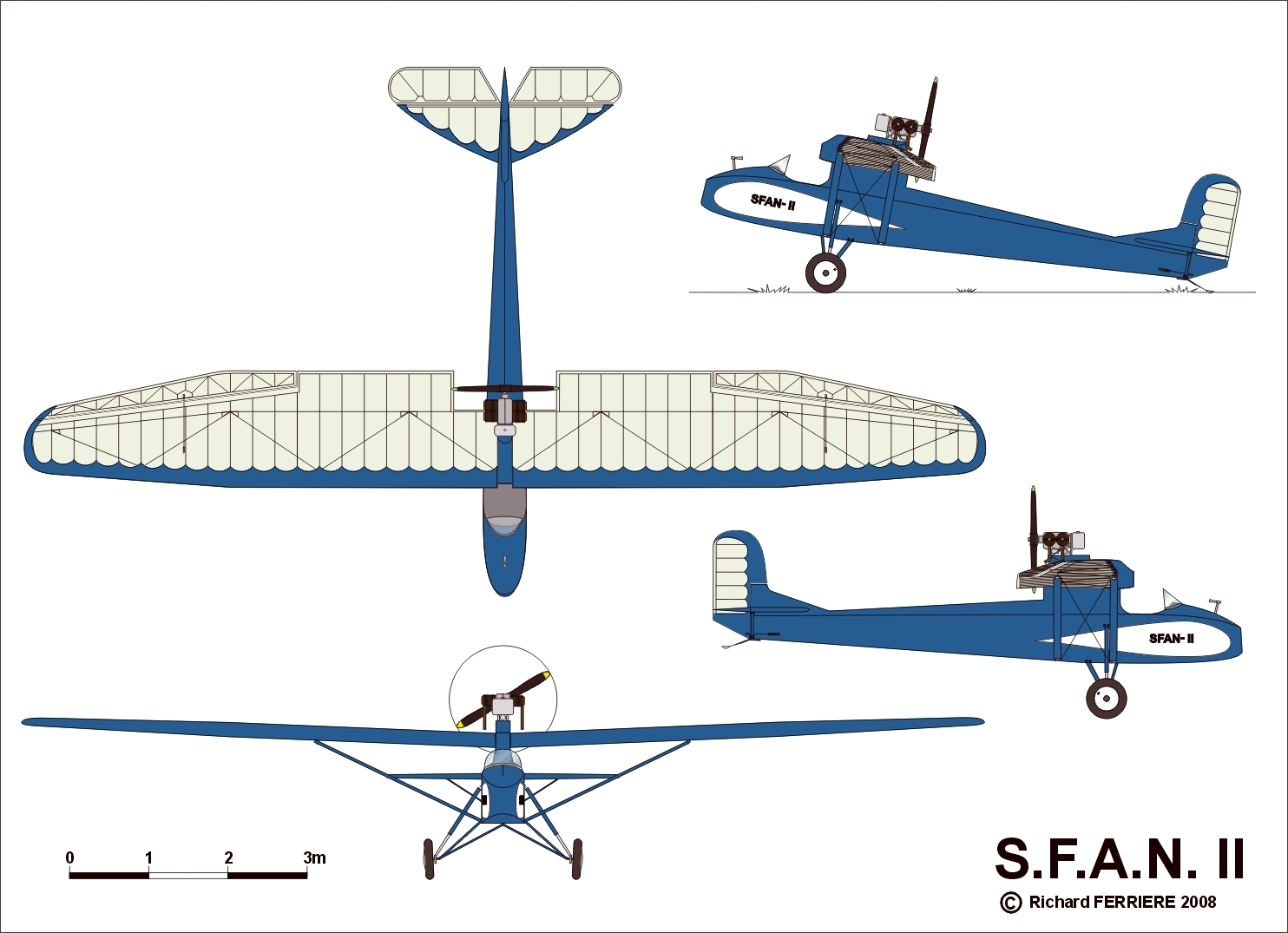
SfanⅡ
推力が小さいときは推力線が多少ずれても気になりません。 「Sfan2(1935年)」の実機の推力線は翼の上にあり,ほぼ水平です。


Original image:▶retroplane.net
Original:target4today.com サイト:target4today.com
模型の場合は推力が機体重量に近いのでかなりのダウンスラストにしています。
SZD-45A Ogarモーターグライダーです。主翼と同じ高さに推力線があります。

Original image:▶flickr.com Photo by ▶[Steve Hall]
2人乗りの軽飛行機です。主翼と同じ高さに推力線があります。

Original image:拡大写真へのリンク サイト:skytamer.com
InterPlane Skyboyは大きな取付け角度を持っています。重心位置を前にして大きな揚力でゆっくりと飛ぶようです。 推進式の「InterPlane Skyboy」は推力線が抗力より上になるので頭下げモーメントになります。これを打ち消すために取り付け角度を増やし,大きな迎え角で頭上げモーメントを生じさせゆっくり水平飛行します。 模型の場合は推力が大きく,速度変化が大きいので取り付け角度を普通にして推力線を思い切って大きくする必要があります。スラストラインの後を水平より10°上にしました。
Lake Aircraft Lake LA-250
水平尾翼を見れば水平飛行している状態だと思います。かなり取り付け角度が大きいようです。 かなり頭下げモーメントになると思いますが,プロペラ後流の中心に尾翼があります。模型の場合は水平尾翼で調整できるかもしれません。
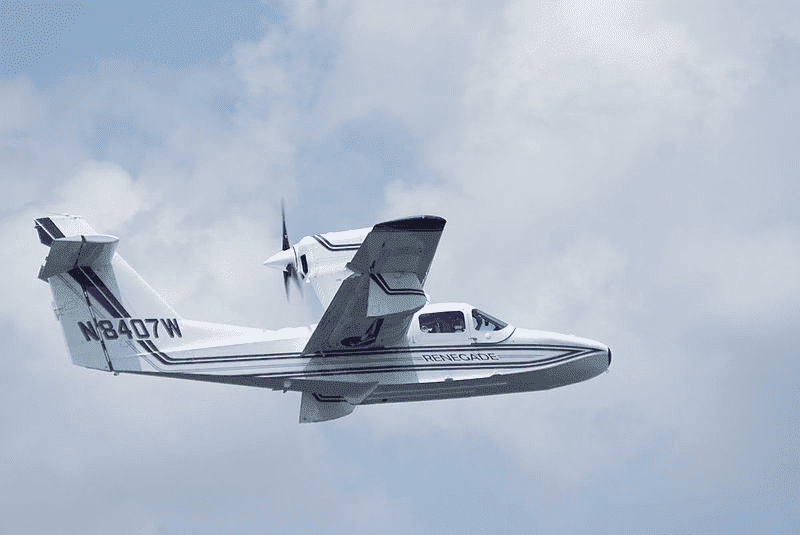
Photo by Valder137 flickr.com) Original image: ▶via Wikimedia Commons(CC BY 2.0)
参考文献等 ▶航空実用辞典 JAL ●「よくわかる航空力学の基本」 東京都立産業技術高等専門学校教授 飯野 明 監修 ▶数学・物理入門 微分方程式と力学系 スバリズムレポート 中部自動車販売株式会社 ▶「航空機はなぜ飛ぶのか??飛行機が飛ぶ原理とは?」|
